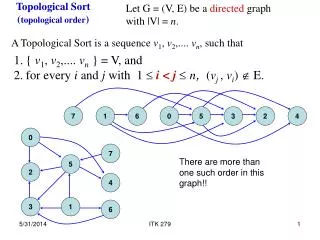
Introduction to Topological Navigation
500 likes | 782 Views
Introduction to Topological Navigation . prof: S.Shiry Presenter: Masoomeh Bahreini M.Sc Computer Science Department of Computer Eng. and IT Amirkabir Univ. of Technology (Tehran Polytechnic) winter1383. Objectives. Definition of Navigation Fundemental functions of navigation

Introduction to Topological Navigation
E N D
Presentation Transcript
Introduction toTopological Navigation prof:S.Shiry Presenter:Masoomeh Bahreini M.Sc Computer Science Department of Computer Eng. and IT Amirkabir Univ. of Technology (Tehran Polytechnic) winter1383
Objectives • Definition of Navigation • Fundemental functions of navigation • Type of Navigation • Topological Navigation • Vornoi Diagram • Metric Navigation • Summary • Refrence • AppendX
Definition of Navigation Robot navigation is one of the key issue in mobile robotics It consists in driving a robot throgh a given environment,using the information from sensors
Fundemental functions of navigation • Primary functions of navigation: • Where am I? • Localization:relative or absolute • Where am I going? • Usually defied by human operator or mission planner • What’s the best way to get there? • Path planning:qualitative & quantitative • Where have I been? • Map making
Type of Navigation • Metrical Navigation • Needs a geometric model of the world. • Assumes exact sensor information. • Allows a more precise navigation. • Topological Navigation • Leads to a qualitative description of the navigation goals. • Uses a flexible, easy to define, map. • Not suitable for very precise applications. • Ideal Solution • Merge both navigation models. • Metrical: local, more precise, navigation. • Topological: global, less precise, navigation.
Type of Navigation topologic map(qualitive) metric map(quantitive)
Type of Navigation • Navigation • Topological vs Metric methods • Metric methosd: • Potential fields • Topological methods: • Waypoints • Visibility graphs • Vornoi Diagrams
Topological Navigation • Steps of topological navigation • Define topological map • Costruct a Global map • Sence • Sensors:vision,sonar,laser • Construct Local map • Navigation
Topological Navigation • Define &Construction global map • The map should be useful to the application • Amount of abstraction in modeling world • Can be represented as a directed graph where: • Nodes: correspond to key-places in the map. • Transitions: used to travel between key-places. • In robotic soccer, one could have: • Nodes: field zones (half-field, penalty areas). • Transitions: basic movements (turn left, move forward).
Topological Navigation • Global Map (world model) • Provided :user,robot(exploration) • User map:unaccurate,not detailed • the robots will have to be able to deal with inaccuracies and lack of details that comes with the maps provided by users. • It does not require accurate metric and geometric information, and details about obstacles inside the environment can be omitted. • map can be given as a bitmap image,
Topological Navigation • Scale is unknown • Scale is not uniform across the map. • Geometrical details are not available. • Details exact shapes of the walls, • shapes of intersections,… • Obstacles are left out of the map. An Example of a Sketch Floor Map
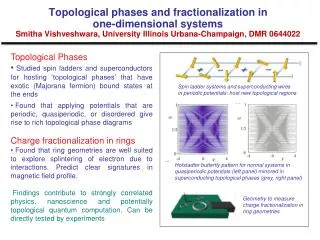
Vornoi diagram • Let P = p1, p2, . . . , pn be a set of points in the 2 dimensional Euclidean plane. P is called the generators. partition the plane by assigning every point in the plane to its nearest point p.P. All those points assigned to pi form the Voronoi region V (pi), that is,V (pi) = {x : |pi - x| = |pj - x| .j = i}. note that some points do not have a unique nearest neighbor. The set of all points that have more than one nearest neighbor forms the Voronoi diagram V(P) A Voronoi vertex is a point p . V(P) that has more than 2 nearest neighbors and a Voronoi edge is a set of points that forms a boundary between Voronoi regions.
Vornoi diagram p1 p1 p3 p2 p2
Vornoi diagram • Vornoi diagram with 2 points
Vornoi diagram • Vornoi diagram with 3 points
Vornoi diagram • Vornoi diagram of floor map
Augmented Topological Map • a traditional topological map is a graph that represents connectivity between landmarks, without containing any metric or geometrical information. • +-intersectionis a node connected with 4 arcs that extends approximately perpendicularly to each other. • T-intersectionis a node that is connected with 3 arcs, with two of them perpendicular to the other. • Endpointis a node that where the Voronoi diagram ends at a wall. • Dead-endis a node that has 3 neighbors, and two of them are Endpoints. • Corneris a node that has 3 neighbors, and one of them is an Endpoint. • Genericnodeis a node that is not any of the above
Map Localization • Essential step for navigation (topological or metrical). • In the topological case, it’s equivalent to identify in which node (of the graph) the robot is. • Might be expressed as a classification problem. • current input map projection is compered to the projection of global map • Make use of k-nearest neighbour method to localize the robot in a node/class.
Map Localization • Method of matching • Iconic: • use raw (or near raw) sensor readings • Feature-based: • use features extracted from raw data • Label and match corners, walls • Less features, so less computations • Metric map-making relies on iconic localization • Toplogical map-making relies on Feature-based localization
Map Localization • Match between nodes • Two nodes strictly match if • they have the same number of neighbors • have the same attributes, without considering diference of labels. • For example, a Corner node v that has three neighbors v1, v2, v3 with v2 as the Endpoint matches with a Corner node w that has three neighbors w1,w2,w3 with w1 as the Endpoint.
Map Localization • Two nodes match if they are strictly match • or one of them is a generic node and they have the same number of neighbors • A generic node match everything that has the same number of neighbors as itself.
Map Localization • Robot Pose • a directed arc ij in a topological map that the robot is moving on • robot is somewhere between node i and j, and is heading to node j. • Multiple Hypothesis Tracking.(MHT) • Partially Observable Markov Process(POMP) • Given the last probality distribution and the current observation and action,calculate the probality of being in a state
POMDP • It get states, actions, transitions,observations • (a set of things that can be perceived by the agent ) • An observation function maps each state (or sometimes state/action pair) to a probability distribution over observations • there are unobservable state variables • it is important to estimate missing information and to acquire better strategies that incorporate the prediction of environmental behaviors.
Path Generation • Robot is aimed to sweep throgh all the reachable places of the terrain • Nodes of the graph considered as goals • Use of search algorithms, applied to the graph. • Large Graphs: • Define an heuristic. • use A* • Find the shortest path from start node to a goal node. • Small Graphs • simple search, so it’s not worthy to use an heuristic. • reduce A* or breadth-first search.
Path Following • Ideally, it corresponds to the sequential execution of the transitions defining the generated path. Nevertheless… • Dynamic environment subject to sudden changes. • Some transitions show more than 50% failures. • A failure detection and new path generation mechanism is needed.
Topological Navigation using Occupancy Grid • Each cell of the occupancy grid contains a probality value which is an estimation that the representation position is occupied by some object Occupancy grid can be viewd as a 2-d grayscale image of the environment Digital image processing are valid approaches Skeletization Thinig Vornoi diagram
Topological Navigation using Occupancy Grid • Steps of map building • Gloabal grid building • Sensor interpretation • sonar • Integration over time • Different sensors give different values for a grid cell because of noise and changing viewpoint it’s important to integrate the conditional probalities of distinct moments • Pose estimation • Local map is match with a global map
Topological Maps Use Landmarks • A landmark is one or more perceptually distinctive features of interest on an object or locale of interest • Natural landmark: configuration of existing features that wasn’t put in the environment to aid with the robot’s navigation (ex. gas station on the corner) • Artificial landmark: set of features added to the environment to support navigation (ex. highway sign) • Roboticists avoid artificial landmarks!
Desirable Characteristics of Landmarks • Recognizable (can see it when you need to) • Passive • Perceivable over the entire range of where the robot might need to view it • Distinctive features should be globally unique, or at least locally unique • Perceivable for the task (can extract what you need from it) • ex. can extract relative orientation and depth • Be perceivable from many different viewpoints
Topologial Navigation • Information required to represent each node must be gathered • a set of images P of the space where the robot will navigate • General enouph to represent all the areas of cs
Principal Components Analysis • Use PCA (KL) to compress the information in P • Extraction of • Eigenimages • eigenvectors of the training images covariance matrix: R = X XT • Use only the most significant components – higher eigenvalues.
Construction Square Error The number of eigenvalue Choose to represent eigenspace These expressions provide a criteria to choose the number of eigenvectores
Map construction • PCA • compute principle images • Space after computation :principle space • project each image in the principle space, associating the projection with the node of graph
Metric Navigation • A geometric map represent objects according to their absolute geometric relationships. • Localization • A sensor-drived geometric map must be matched against a global map of a large area
Summary • Map-based navigation is limited to laboratory setting with well-structured environment • Have not been tested extensively in real-world environment • Require a significant amount of processing and sencing • Higher level task can be performed by the robot after successful exploration.
Summary • Localization and map making are intertwined • Localization requires good maps • Map making requires good localization
Future work • Sensor selection and sensor fusion for specific applications and environments. • Accurate and reliable algorithms for matching local maps to the stored map. • Good error models of sensors and robot motion. • Good algorithms for integrating local maps into a global map. • Higher level task can be performed by the robot after successful exploration
Refrence • Vachirasuk Setalaphruk Atsushi Ueno Izuru Kume Yasuyuki Kono” Robot Navigation in Corridor Environments using a Sketch Floor Map” • Gon¸calo Neto, Hugo Costelha, Pedro Lima “Topological Navigation in Configuration Space Applied to Soccer Robots • Szabo, R. /Topological Navigation of Simulated Robots using Occupancy Grid, pp. 201 - 206, International Journal of Advanced Robotic Systems, Volume 1, Number 3 (2004), ISSN 1729-8806 • J. Borenstein , H. R. Everett , and L. Feng Contributing authors: S. W. Lee and R. H. Byrne“Where am I?Sensors and Methods for Mobile Robot Positioning”
Measurement type in Navigation • Relative • Odometry • Absolute • Active Beacons • Landmark Recognition • Artificial • Distinctive artificial landmarks are placed at known locations in the environment • 3 or more landmarks must be ‘in view’ to allow pose estimation • Detection these landmarks are easier for knowing size and shape • Natural • Distinctive features in the environment • Vertical edges :doors,wall junction • Environment must be known in advance
Measurement type in Navigation • Model Matching • Information acquired from sensors is compared to a map or world model of the environment • Geometric • Represent the world in a global coordinate system • Toplogical • Represent the world as a network of nodes and arcs