Object Recognizing
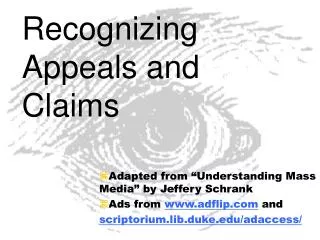
Object Recognizing. Recognition. Features Classifiers Example ‘winning’ system. Object Classes. Individual Recognition. Object parts Automatic, or query-driven. Window. Mirror. Window. Door knob. Headlight. Back wheel. Bumper. Front wheel. Headlight. Class Non-class .

Object Recognizing
E N D
Presentation Transcript
Recognition • Features • Classifiers • Example ‘winning’ system
Object partsAutomatic, or query-driven Window Mirror Window Door knob Headlight Back wheel Bumper Front wheel Headlight
Features and Classifiers Same features with different classifiers Same classifier with different features
Generic Features Simple (wavelets) Complex (Geons)
Optimal Class Components? • Large features are too rare • Small features are found everywhere Find features that carry the highest amount of information
Mutual information H(C) F=0 F=1 H(C) when F=1 H(C) when F=0 I(C;F) = H(C) – H(C/F)
Mutual Information I(C,F) Class: 1 1 0 1 0 1 0 0 Feature: 1 0 0 1 1 1 0 0 I(F,C) = H(C) – H(C|F)
Optimal classification features • Theoretically: maximizing delivered information minimizes classification error • In practice: informative object components can be identified in training images
KL Classification Error P(C,F) determines the best classification error: p(F|C) p(C) C F p(C|F)
Adding a New Fragment(max-min selection) MIΔ ? MI = MI [Δ ; class] - MI [ ; class ] Select: Maxi MinkΔMI (Fi, Fk) (Min. over existing fragments, Max. over the entire pool)
Horse-class features Car-class features Pictorial features Learned from examples
Fragments with positions On all detected fragments within their regions
Class-fragments and Activation Malach et al 2008
– Bag of visual words A large collection of image patches
– – – Each class has its words historgram Limited or no Geometry Simple and popular, no longer state-of-the art.
HoG Descriptor Dallal, N & Triggs, B. Histograms of Oriented Gradients for Human Detection
SIFT: Scale-invariant Feature Transform • MSER: Maximally Stable Extremal Regions • SURF: Speeded-up Robust Features • Cross correlation • …. • HoG and SIFT are the most widely used.
Optimal Separation SVM Perceptron The Nature of Statistical Learning Theory, 1995 Rosenblatt, Principles of Neurodynamics 1962. Find a separating plane such that the closest points are as far as possible
+1 The Margin -1 0 Separating line: w ∙ x + b = 0 Far line: w ∙ x + b = +1 Their distance: w ∙ ∆x = +1 Separation: |∆x| = 1/|w| Margin: 2/|w|
Max Margin Classification The examples are vectors xi The labels yi are +1 for class, -1 for non-class (Equivalently, usually used How to solve such constraint optimization?
Using Lagrange multipliers: Using Lagrange multipliers: Minimize LP = With αi > 0 the Lagrange multipliers
Minimizing the Lagrangian Minimize Lp : Set all derivatives to 0: Also for the derivative w.r.t. αi Dual formulation: Maximize the Lagrangian w.r.t. the αi and the above two conditions.
Dual formulation Mathematically equivalent formulation: Can maximize the Lagrangian with respect to the αi After manipulations – concise matrix form:
SVM: in simple matrix form We first find the α. From this we can find: w, b, and the support vectors. The matrix H is a simple ‘data matrix’: Hij = yiyj <xi∙xj> Final classification: w∙x + b ∑αi yi <xi x> + b Because w = ∑αi yi xi Only <xi x> with support vectors are used
Full story – separable case Classification of a new data point x: sgn ( ∑ [αi yi <xi x> + b] )
Quadratic Programming QP Minimize (with respect to x) Subject to one or more constraints of the form: Ax < b (inequality constraints) Ex = d (equality constraints) The problem can be solved in polynomial time of Pos. def. Q. (NP-hard otherwise)
Full story: separable case Non- C ≥ Classification of a new data point x: sgn ( ∑ [αi yi <xi x> + b] )
Full story – Kernal case Hij = K(xi,xj) Classification of a new data point x: sgn ( ∑ [αi yi <xi x> + b] )
Felzenszwalb Algorithm • Felzenszwalb, McAllester, Ramanan CVPR 2008. A Discriminatively Trained, Multiscale, Deformable Part Model • Many implementation details, will describe the main points.
Using patches with HoG descriptors and classification by SVM Person model: HoG
Object model using HoG A bicycle and its ‘root filter’ The root filter is a patch of HoG descriptor Image is partitioned into 8x8 pixel cells In each block we compute a histogram of gradient orientations
Dealing with scale: multi-scale analysis The filter is searched on a pyramid of HoG descriptors, to deal with unknown scale
Adding Parts A part Pi = (Fi, vi, si, ai, bi). Fi is filter for the i-th part, vi is the center for a box of possible positions for part i relative to the root position, si the size of this box ai and bi are two-dimensional vectors specifying coefficients of a quadratic function measuring a score for each possible placement of the i-th part. That is, ai and bi are two numbers each, and the penalty for deviation ∆x, ∆y from the expected location is a1 ∆x + a2 ∆y+ b1 ∆x2 + b2 ∆y2
Bicycle model: root, parts, spatial map Person model