Download
1 / 1
20 likes | 255 Views
Group 9 Demo Times 9-10:30, 1:30-2:30 Thursday, April 24, 2008. LabVIEW Wav File : The audio input port of any laptop/computer is used to record a 2.5 second wav file. FFT : The wav file is sampled to construct the FFT of the file and obtain the fundamental frequency of the signal.

E N D
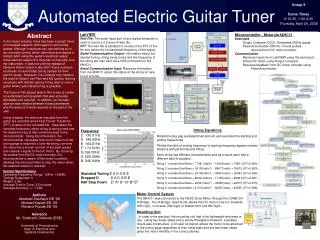
Group 9 Demo Times 9-10:30, 1:30-2:30 Thursday, April 24, 2008 LabVIEW Wav File: The audio input port of any laptop/computer is used to record a 2.5 second wav file. FFT: The wav file is sampled to construct the FFT of the file and obtain the fundamental frequency of the signal. Serial Communication Output: Information about the desired tuning, string being tuned and the frequency of the string are then sent via a USB connection to the 68HC11. Serial Communication Input: Receives information from the 68HC11 about the status of the string (in tune or out of tune). Microcontroller - Motorola 68HC11Interrupts Output Compare (OC2): Generates 500Hz signal. Pulse Accumulator (PAOV): Counts pulses received from DC motor encoder. Communication Receives inputs from LabVIEW using the serial port. Drives DC motor using Output Compare. Receives feedback from DC motor encoder using Pulse Accumulator. Automated Electric Guitar Tuner Abstract In the music industry, there has been a recent trend of increased research with regard to self-tuning guitars. Although musicians can use devices such as chromatic tuners, which determine and display a string’s pitch using the guitar’s electrical output, these devices require the musician to manually tune the instrument. It was not until the release of Gibson’s Robot Guitar in late 2007 that a musician could own an automated tuning system for their electric guitar. However, it is currently only made in the style of Gibson Les Paul and SG guitars, leaving musicians with limited options if they wish to own a guitar where automated tuning is possible. The focus of this project was to find a way to create an automated tuning system that was accurate, affordable and external. In addition, an intricate balance was needed between those parameters and the amount of work required on the part of the user. Using a laptop, the electrical impulses from the guitar are recorded and a Fast Fourier Transform (FFT) is taken of the recorded file. Data about the recorded frequency, which string is being tuned and the desired tuning is then communicated to the microcontroller. Using this information, the microcontroller calculates how much rotation of the tuning pegs is required to tune the string, converts the value into a known number of encoder pulses and outputs a signal to the DC motor. By counting the pulses from the DC motor encoder, the microcontroller is aware of the motor’s position, allowing the microcontroller to stop the motor when the desired rotation is reached. System Specifications Operating Frequency Range: 124Hz -1065Hz Tunings Supported: 3 Weight: 2 lbs. Average Time to Tune: 3.5 minutes Average Accuracy: +/- 1.5Hz Authors Abraham Dauhajre EE ’08 Michael Kaplan EE ’08 Richard Prusak EE ‘08 Advisors Mr. Siddharth Deliwala (ESE) University of Pennsylvania Dept. of Electrical and Systems Engineering String Equations Rotated tuning peg predetermined amount and recorded the starting and ending frequencies. Plotted the ratio of ending frequency to starting frequency against rotation distance and performed plot fitting. Each string has different characteristics and as a result each had a different best fit equation. String 1: encoderOverflows = 7748.1(ratio2) - 15424(ratio) + 7683.3 {R2=0.959} String 2: encoderOverflows = 34106(ratio2) - 69671(ratio) + 35612 {R2=0.963} String 3: encoderOverflows = 22164(ratio2) - 44591(ratio) + 22444 {R2=0.996} String 4: encoderOverflows = 8542.4(ratio2) - 17180(ratio) + 8649.9 {R2=0.951} String 5: encoderOverflows = 22521(ratio2) - 45083(ratio) + 22573 {R2=0.973} String 6: encoderOverflows = 41515(ratio2) - 82067(ratio) + 40565 {R2=0.998} Frequency C 130.81Hz D 146.83Hz E 164.81Hz F 174.61Hz G 196.00Hz A 220.00Hz B 246.94Hz Standard Tuning E A D G B E Dropped D D A D G B E Half Step Down Eb Ab Db Gb Bb Eb Motor Control SystemThe 68HC11 was connected to theREXC Drive Motor through the CVHB-201 H-Bridge. The H-Bridge, rated at 2A, allows the DC motor to be run forwards (IN1 high), in reverse (IN2 high) or braked (IN1 and IN2 high). Mounting UnitIn order to be practical, the mounting unit had to be lightweight and easy to use. Using two linear slides and a sturdy Plexiglas framework, a durable mount was constructed. A circular connector allows the motor to be attached to the tuning pegs regardless of their initial state and the two linear slides gives the motor mobility in the x and y planes.