Download
1 / 49
490 likes | 728 Views
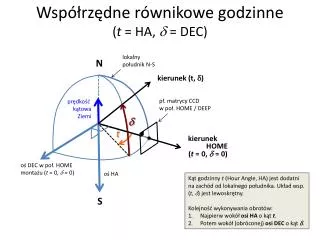
Współrzędne równikowe godzinne ( t = HA, d = DEC). lokalny południk N-S. N. kierunek (t, d ). pł . matrycy CCD w poł. HOME / DEEP. prędkość kątowa Ziemi. d. t. kierunek HOME ( t = 0, d = 0 ). oś DEC w poł. HOME montażu ( t = 0, d = 0). oś HA.

E N D
Współrzędne równikowe godzinne (t = HA, d = DEC) lokalny południk N-S N kierunek (t, d) pł. matrycy CCD w poł. HOME / DEEP prędkość kątowa Ziemi d t kierunek HOME (t = 0, d= 0) oś DEC w poł. HOME montażu (t = 0, d = 0) oś HA Kąt godzinny t (HourAngle, HA) jest dodatni na zachód od lokalnego południka. Układ wsp. (t, d) jest lewoskrętny. Kolejność wykonywania obrotów: Najpierw wokół osi HA o kąt t. Potem wokół (obróconej) osi DEC o kąt d. S
Współrzędne równikowe godzinne (t = HA, d = DEC) dRAW= l+90° > 90° d = -l+90° N montaż na półkuli północnej z kamerami w poł. HOME dRAW= d = 90° N oś DEC w poł. HOME montażu (t = 0, d = 0) Z dRAW= d = l l l kierunek HOME tRAW= t = 0 dRAW= d = 0 W oś HA prędkość kątowa Ziemi pł. horyzontu l > 0 S dRAW= d= l-90° • Oznaczenia kątów: • szer. geogr. płn l > 0 • wsp. astronomiczne (t, d) • kąty mechaniczne względem poł. HOME • (tRAW, dRAW) lokalny południk N-S S
Współrzędne równikowe godzinne (t = HA, d = DEC) dRAW= |l|+90° > 90° d = |l|-90° S montaż na półkuli południowej z kamerami w poł. HOME dRAW= 90° d= -90° S oś HA Z dRAW= |l| d= -|l| |l| oś DEC w poł. HOME montażu (t = 0, d = 0) |l| × kierunek HOME tRAW=t= 0 dRAW= d = 0 E pł. horyzontu |l|> 0 prędkość kątowa Ziemi N dRAW= |l|-90° d= -|l|+90° • Oznaczenia kątów: • szer. geogr. płn l < 0 • wsp. astronomiczne (t, d) • kąty mechaniczne względem poł. HOME • (tRAW, dRAW) lokalny południk N-S N
Definicja osi DEEP/WIDE oś DEEP-WIDE (D/W) Punkt referencyjny na matrycy CCD krawędź X CCD krawędź Y CCD zwrot osi D/W zgodny z regułą śruby prawoskrętnej A’ A obrót o kąt y > 0 Płaszczyzna matrycy CCD, widok od strony obiektywu • y= 0 DEEP • y = ymax > 0 WIDE
Obecny montaż w INTA (4 kamery) • CCD + obiektyw: • X=2062 × Y=2048 pikseli • 36 arcsec / piksel • Zakres ruchu osi HA, DEC: (z wyłączeniem stref hamowania) • HARAW : [-162°, 162°] ⇒ zakres użyteczny 324° • DECRAW: [-12°, 190°] ⇒ zakres użyteczny 202° • Kierunek i zakres ruchu osi D/W: • HADW = ±90° • DECDW = ±45° • yDW : [0, 15°]
Osie DEEP/WIDE INTA N Montaż w położeniu HOME na półkuli północnej (t = 0, d = 0, y = 0): 3 0 l 1 2 oś DEC W E N x x x x pł. horyzontu S oś D/W oś D/W oś HA Dla montażu w INTA (l = 37° N): współrzędne wersorówCCD: CCD X t = -90° d = 0 CCD Y t = 0 d = -90° współrzędne wersorów D/W: CAM 0 t = -90° d = -45° CAM 1 t = 90° d = -45° CAM 2 t = 90° d = 45° CAM 3 t = -90° d = 45° kąt obrotu wokół osi D/W: y = 15° y y y y CAM 0 CAM 3 kierunek HOME (t = 0, d= 0) E W oś D/W oś D/W S CAM 2 CAM 1
Osie DEEP/WIDE INTA Montaż w położeniu HOME na półkuli północnej (t = 0, d = 0, y = 0): oś DEC Dla montażu w INTA (l = 37° N): po obróceniu matryc CCD o kąt y=15° wokół 4 osi D/W: CAM 0 patrzy w kier. S-W CAM 1 patrzy w kier. N-W CAM 2 patrzy w kier. N-E CAM 3 patrzy w kier. S-E N x x x x oś D/W oś D/W oś HA y y y y CAM 0 CAM 3 kierunek HOME (t = 0, d= 0) E W UWAGA: Sytuacja przedstawiona na rysunku odnosi się do fizycznej orientacji samych chipów CCD w kamerze; po założeniu obiektywu obraz widziany przez kamerę ulega obróceniu o 180° w pł. CCD. oś D/W oś D/W S CAM 2 CAM 1
Osie DEEP/WIDE INTA Montaż w położeniu HOME na półkuli północnej (t = 0, d = 0, y = 0): HOME CAM 0 CAM 3 S E W N
Osie DEEP/WIDE INTA Montaż w położeniu HOME na półkuli północnej (t = 0, d = 0, y = 0): HOME HOME CAM 3 CAM 0 N CAM 3 CAM 0 W E CAM 2 CAM 1 CAM 2 CAM 1 S oś D/W dla CAM 1
Montaż w INTA (tryb WIDE) Dla montażu w INTA (l = 37° N): po obróceniu matryc CCD o kąt y = 15° wokół 4 osi D/W: CAM 0 patrzy w kier. S-W CAM 1 patrzy w kier. N-W CAM 2 patrzy w kier. N-E CAM 3 patrzy w kier. S-E Strzałki oznaczają wersory osi D/W ⊥ kier. HOME Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) kierunek HOME UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami.
Montaż w INTA (tryb WIDE) Dla montażu w INTA (l = 37° N): po obróceniu matryc CCD o kąt y = 15° wokół 4 osi D/W: CAM 0 patrzy w kier. S-W CAM 1 patrzy w kier. N-W CAM 2 patrzy w kier. N-E CAM 3 patrzy w kier. S-E UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamery CCD z założonym obiektywem. Układ współrzędnych równikowych (t, d) jest lewoskrętny, dlatego na rysunku 2D orientacja osi HA jest inna niż na rysunku 3D.
Montaż w INTA (tryb WIDE) Półkula północna (INTA, l = 37° N)
Montaż w INTA (tryb WIDE) Półkula północna (INTA, l = 37° N)
Montaż w INTA (tryb WIDE) Półkula północna (INTA, l = 37° N)
Montaż w INTA (tryb WIDE) Półkula północna (INTA, l = 37° N)
Nowy montaż opcja (A) • W trybie WIDE kamery są odchylone „do środka” (tzn. konfiguracja jak w INTA) :
Osie DEEP/WIDE nowy montaż (A) N Montaż w położeniu HOME na półkuli północnej (t = 0, d = 0, y = 0): 3 0 l 1 2 oś DEC W E N x x x x pł. horyzontu S oś D/W oś D/W oś HA Na półkuli północnej (l> 0): współrzędne wersorówCCD: CCD X t = -90° d = 0 CCD Y t = 0 d = -90° współrzędne wersorów D/W: CAM 0 t = -90° d = -56° CAM 1 t = 90° d = -56° CAM 2 t = 90° d = 56° CAM 3 t = -90° d = 56° kąt obrotu D/W: y = 3.7° y y y y 56° 56° CAM 3 CAM 0 kierunek HOME (t = 0, d= 0) W E oś D/W oś D/W S 56° 56° CAM 1 CAM 2
NOWY montaż (4 kamery) (A) • CCD + obiektyw: • X=4008 × Y=2672 pikseli • 6.3 arcsec / piksel • Zakres ruchu osi HA, DEC: (z wyłączeniem stref hamowania) • HARAW : [-150°, 150°] ⇒ zakres użyteczny 300°(zależy od testów silnika) • DECRAW: [-45°, 105°] ⇒ zakres użyteczny 150° • Kierunek i zakres ruchu osi D/W: • HADW = ±90° • DECDW = ±56° • yDW : [0, 3.7°]
Optymalny kąt rozchylania yDW (A) • CCD + obiektyw: • X=4008 × Y=2672 pikseli • 6.3 arcsec / piksel • Kierunek osi D/W w położeniu HOME: • HADW = ± 90° • DECDW = ± 56° ≥100 wspólnych pikseli zakładając niepewność ustawiania yDW≤ 0.3°
NOWY montaż (tryb WIDE, 4 kamery) (A) Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami. Półkula północna (INTA, l = 37° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula północna (INTA, l = 37° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula północna (INTA, l = 37° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula północna (INTA, l = 37° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula północna (INTA, l = 37° N)
Osie DEEP/WIDE nowy montaż (A) S Montaż w położeniu HOME na półkuli południowej (t = 0, d = 0, y = 0): 3 0 |l| 1 2 oś HA E W x x S pł. horyzontu y y N oś D/W oś D/W oś DEC Na półkuli południowej (l< 0): współrzędne wersorówCCD: CCD X t = 90° d = 0 CCD Y t = 0 d = 90° współrzędne wersorów D/W: CAM 0 t = 90° d = 56° CAM 1 t = -90° d = 56° CAM 2 t = -90° d = -56° CAM 3 t = 90° d = -56° kąt obrotu D/W: y = 3.7° 56° 56° CAM 3 CAM 0 kierunek HOME (t = 0, d= 0) E W x x y y oś D/W oś D/W N 56° 56° CAM 1 CAM 2
NOWY montaż (tryb WIDE, 4 kamery) (A) Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami. Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (2 z 4 kamer) (A) • CCD + obiektyw:(zainstalowane tylko kamery 0 i 1) • X=4008 × Y=2672 pikseli • 6.3 arcsec / piksel • Zakres ruchu osi HA, DEC: (z wyłączeniem stref hamowania) • HARAW : [-150°, 150°] ⇒ zakres użyteczny 300°(zależy od testów silnika) • DECRAW: [-45°, 105°] ⇒ zakres użyteczny 150° • Kierunek i zakres ruchu osi D/W: • HADW = ±90° • DECDW = ±56° • yDW : [0, 3.7°]
NOWY montaż (tryb WIDE, 2 kamery) (A) Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami. Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (A) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (A) Półkula południowa (SPdA, l = -23° N)
Nowy montaż opcja (B) • W trybie WIDE kamery są odchylone „na zewnątrz” :
Osie DEEP/WIDE nowy montaż (B) S Montaż w położeniu HOME na półkuli południowej (t = 0, d = 0, y = 0): 3 0 |l| 1 2 oś HA E W x x S pł. horyzontu y y N oś D/W oś D/W oś DEC Na półkuli południowej (l< 0): współrzędne wersorówCCD: CCD X t = 90° d = 0 CCD Y t = 0 d = 90° współrzędne wersorów D/W: CAM 0 t = -90° d = -56° CAM 1 t = 90° d = -56° CAM 2 t = 90° d = 56° CAM 3 t = -90° d= 56° kąt obrotu D/W: y = 3.7° 56° 56° CAM 3 CAM 0 kierunek HOME (t = 0, d= 0) E W x x y y oś D/W oś D/W N 56° 56° CAM 1 CAM 2
NOWY montaż (tryb WIDE, 4 kamery) (B) Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami. Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 4 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (2 z 4 kamer) (B) • CCD + obiektyw:(zainstalowane tylko kamery 0 i 1) • X=4008 × Y=2672 pikseli • 6.3 arcsec / piksel • Zakres ruchu osi HA, DEC: (z wyłączeniem stref hamowania) • HARAW : [-150°, 150°] ⇒ zakres użyteczny 300°(zależy od testów silnika) • DECRAW: [-45°, 105°] ⇒ zakres użyteczny 150° • Kierunek i zakres ruchu osi D/W: • HADW = ±90° • DECDW = ±56° • yDW : [0, 3.7°]
NOWY montaż (tryb WIDE, 2 kamery) (B) Lokalny południk (t = 0) t > 0 d> 0 Równik niebieski (d = 0) UWAGA: Sytuacja przedstawiona na rysunku odnosi się do kamer CCD z założonymi obiektywami. Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (B) Półkula południowa (SPdA, l = -23° N)
NOWY montaż (tryb WIDE, 2 kamery) (B) Półkula południowa (SPdA, l = -23° N)