Download

1 / 0
0 likes | 231 Views
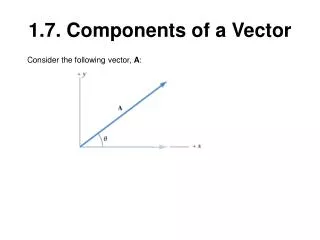
5. 4. 3. 2. 1. p/6. Polaris Coordinates of a Vector. How can we represent a vector?. We plot an arrow: • the length proportional to magnitude of vector • the line represents the vector direction • the point represents the vector path. . e.g. we plot a vector with:

E N D