Enhanced Sampling Strategies for Probabilistic Roadmap Planners in Cluttered Environments
This document explores advanced sampling strategies for Probabilistic Roadmap Methods (PRMs) in complex environments, highlighting the importance of addressing narrow passages and obstacle configurations. It discusses the use of an obstacle-based PRM and outlines innovative approaches such as the Bridge Test for sampling narrow passages and the Medial-Axis Based PRM for optimal path planning. These techniques aim to improve the efficiency of manipulation planning by focusing on contact surfaces while navigating through cluttered spaces. The effectiveness and challenges of each method are examined.

Enhanced Sampling Strategies for Probabilistic Roadmap Planners in Cluttered Environments
E N D
Presentation Transcript
Sampling Strategies for PRMs modified from slides of T.V.N. Sri Ram
Issue • Narrow passages
OBPRMs A randomized roadmap method for path and manipulation planning (Amato,Wu ICRA’96) OBPRM: An obstacle-based PRM for 3D workspaces (Amato,Bayazit, Dale, Jones and Vallejo)
Basic Ideas Given Algorithm
Finding points on C-objects • Determine a point o (the origin) inside s • Select m rays with origin o and directions uniformly distributed in C-space • For each ray identified above, use binary search to determine a point on s
Issues • Selection of o in C-obstacle is crucial • To obtain uniform distribution of samples on the surface, would like to place origin somewhere near the center of C-object. • Still skewed objects would present a problem
Issues (contd) • Paths touch C-obstacle
Main Advantage • Useful in manipulation planning where the robot has to move along contact surfaces • Useful when C-space is very cluttered.
Bridge Test The Bridge Test for Sampling Narrow Passages with Probabilistic Roadmap Planners (Hsu, Jiang, Reif, Sun ICRA’03)
Main Idea • Accept mid-point as a new node in roadmap graph if two end-points are in collision and mid-point is free • Constrain the length of the bridge: Favourable to build these in narrow passages
Contribution over previous Obstacle–Based Methods • Avoids sampling “uninteresting” obstacle boundaries. • Local Approach: Does not need to “capture” the C-obstacle in any sense • Complementary to the Uniform Sampling Approach
Issues • Deciding the probability density (πB )around a point P, which has been chosen as first end-point. • Combining Bridge Builder and Uniform Sampling • π =(1-w). πB +w.πv • πB : probability density induced by the Bridge Builder • πv : probability density induced by uniform sampling
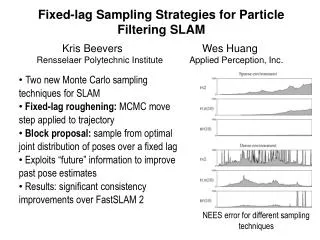
Results Ncon Nmil Nclear
Medial-Axis Based PRM MAPRM: A Probabilistic Roadmap Planner with Sampling on the Medial Axis of the Free Space (Wilmarth, Amato, Stiller ICRA’99)
Main Ideas • Beneficial to have samples on the medial axis; however, computation of medial axis itself is costly. • Retraction : takes nodes from free and obstacle space onto the medial axis w/o explicit computation of the medial axis. • This method increases the number of nodes found in a narrow corridor • independent of the volume of corridor • Depends on obstacles bounding it
Approach for Free-Space • Find xo (nearest boundary point) for each point x in Free Space. • Search along the ray xox and find arbitrarily close points xa and xb s.t. xo is the nearest point on the boundary for xa but not xb. • Called canonical retraction map
Extended Retraction Map • Doing only for Free-Space => Only more clearance. Doesn’t increase samples in Narrow Passages • Retract points that fall in Cobstacle also. • Retract points in the direction of the nearest boundary point
Results for 2D case • LEFT: Helpful: obstacle-space that retracts to narrow passage is large • RIGHT: Not Helpful: Obstacle-space seeping into medial axis in narrow corridor is very low
Main Results • Demonstrates an approach to use medial axis based ideas with random sampling • Advantages: • Useful in cluttered environments. Where a great volume of obstacle space is adjacent to narrow spaces • Above Environment: Bisection technique for evaluating point on medial axis???
Limitations • Additional primitive: “Nearest Contact Configuration”. For larger (complex) problems, this time may become significant…. • Extension to higher dimensions difficult. Which direction to search for nearest contact?