
Anklebot Control System for Robot-Aided Neurorehabilitation
This schematic representation illustrates the control system of Anklebot, a novel robotic device designed to aid in ankle rehabilitation. The model includes critical parameters such as ankle angles, moment of inertia, stiffness, damping, and torques relevant to both the robot and the human ankle. The accompanying photograph shows Anklebot being utilized in seated training, where real-time video feedback is provided. By isolating ankle movement, this system enhances outcomes in patients recovering from hemiparetic gait post-stroke, demonstrating significant advancements in rehabilitation technology.

Anklebot Control System for Robot-Aided Neurorehabilitation
E N D
Presentation Transcript
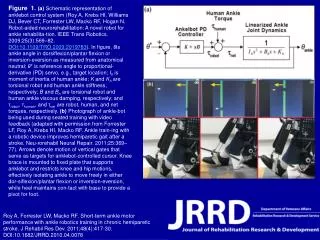
Figure 1.(a) Schematic representation of anklebot control system (Roy A, Krebs HI, Williams DJ, Bever CT, Forrester LW, Macko RF, Hogan N. Robot-aided neurorehabilitation: A novel robot for ankle rehabilita-tion. IEEE Trans Robotics. 2009;25(3):569–82. DOI:10.1109/TRO.2009.2019783). In figure, θis ankle angle in dorsiflexion/plantar flexion or inversion-eversion as measured from anatomical neutral; θ* is reference angle to proportional-derivative (PD) servo, e.g., target location; Ih is moment of inertia of human ankle; K and Kh are torsional robot and human ankle stiffness, respectively; B and Bh are torsional robot and human ankle viscous damping, respectively; and τrobot, τhuman, and τnet are robot, human, and net torques, respectively. (b) Photograph of ankle-bot being used during seated training with video feedback (adapted with permission from Forrester LF, Roy A, Krebs HI, Macko RF. Ankle train-ing with a robotic device improves hemiparetic gait after a stroke. Neu-rorehabil Neural Repair. 2011;25:369–77). Arrows denote motion of vertical gates that serve as targets for anklebot-controlled cursor. Knee brace is mounted to fixed plate that supports anklebot and restricts knee and hip motions, effectively isolating ankle to move freely in either dor-siflexion/plantar flexion or inversion-eversion, while heel maintains con-tact with base to provide a pivot for foot. Roy A, Forrester LW, Macko RF. Short-term ankle motor performance with ankle robotics training in chronic hemiparetic stroke. J Rehabil Res Dev. 2011;48(4):417-30.DOI:10.1682/JRRD.2010.04.0078