
Comparative Evaluation of Finger Transmission Principles in Prosthetic Hand Design
Explore the design and evaluation of pulley-cable and hydraulic cylinder finger transmission principles in body-powered prosthetic hands. This study investigates the activation force and pressure required for both mechanisms, offering insights into enhancing hand functionality.

Comparative Evaluation of Finger Transmission Principles in Prosthetic Hand Design
E N D
Presentation Transcript
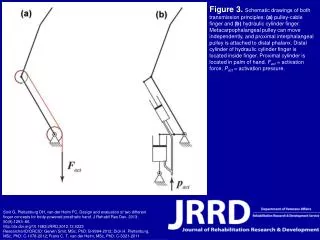
Figure 3. Schematic drawings of both transmission principles: (a) pulley-cable finger and (b) hydraulic cylinder finger. Metacarpophalangeal pulley can move independently, and proximal interphalangeal pulley is attached to distal phalanx. Distal cylinder of hydraulic cylinder finger is located inside finger. Proximal cylinder is located in palm of hand. Fact = activation force, Pact = activation pressure. Smit G, Plettenburg DH, van der Helm FC. Design and evaluation of two different finger concepts for body-powered prosthetic hand. J Rehabil Res Dev. 2013; 50(9):1253–66. http://dx.doi.org/10.1682/JRRD.2012.12.0223 ResearcherID/ORCID: Gerwin Smit, MSc, PhD: B-9994-2012; Dick H. Plettenburg, MSc, PhD: C-1078-2012; Frans C. T. van der Helm, MSc, PhD: C-3321-2011