
AR ジオラマにおける領域分割に基づく 三次元形状復元手法
馬勝 淳史 * 1 間下 以大 * 2 清川 清 * 2 竹村 治雄 * 2 * 1 大阪大学大学院 情報科学研究科 * 2 大阪大学 サイバーメディアセンター. 背景. 目的. 簡易なデバイスによる物体復元・再配置用 AR システム( AR ジオラマ)を提唱. 実環境の物体形状を復元する機能の改善. 問題. 拡張現実. AR ジオラマにおける領域分割に基づく 三次元形状復元手法. 何もない状態から手法を考えるのは 1.時間がかかりすぎる 2.うまくいく保証がない. 既存手法の調査と実装. 現実世界. 動作結果. アプローチ. 領域分割結果.

AR ジオラマにおける領域分割に基づく 三次元形状復元手法
E N D
Presentation Transcript
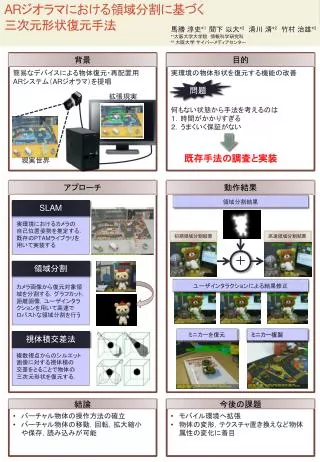
馬勝淳史*1 間下以大*2清川清*2竹村 治雄*2 *1大阪大学大学院 情報科学研究科 *2大阪大学 サイバーメディアセンター 背景 目的 簡易なデバイスによる物体復元・再配置用 ARシステム(ARジオラマ)を提唱 実環境の物体形状を復元する機能の改善 問題 拡張現実 ARジオラマにおける領域分割に基づく三次元形状復元手法 何もない状態から手法を考えるのは 1.時間がかかりすぎる 2.うまくいく保証がない 既存手法の調査と実装 現実世界 動作結果 アプローチ 領域分割結果 SLAM 視体積交差法 領域分割 実環境におけるカメラの 自己位置姿勢を推定する. 既存のPTAMライブラリを 用いて実装する カメラ画像から復元対象領域を分割する.グラフカット,距離画像,ユーザインタラクションを用いて高速で ロバストな領域分割を行う 複数視点からのシルエット画像に対する視体積の 交差をとることで物体の 三次元形状を復元する. 初期領域分割結果 高速領域分割結果 + ユーザインタラクションによる結果修正 ミニカーを復元 ミニカー複製 結論 今後の課題 • バーチャル物体の操作方法の確立 • バーチャル物体の移動,回転,拡大縮小や保存,読み込みが可能 • モバイル環境へ拡張 • 物体の変形,テクスチャ置き換えなど物体属性の変化に着目