Download
1 / 17
170 likes | 586 Views
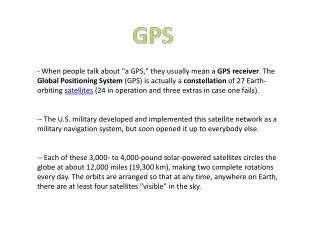
第8週 高精度GPSの構築. 位相測位の原理 通信システムの構築. GPS の測位方式. フェーズによる測位. コードによる測位. SPS. 単独測位. PPS. KGPS (移動) ( RTKGPS ) ( VRSGPS ). DGPS. 差分測位. KGPS (静止). 1 2 5 1 2 5 1 0 20 50 1 2 5 10 20

E N D
第8週 高精度GPSの構築 • 位相測位の原理 • 通信システムの構築
GPSの測位方式 フェーズによる測位 コードによる測位 SPS 単独測位 PPS KGPS(移動) (RTKGPS) (VRSGPS) DGPS 差分測位 KGPS(静止) 1 2 5 1 2 5 1 0 20 50 1 2 5 1020 mm mmmm cm cm cm cm cm cm m m mm m SPS: Standard Position System (単独測位) PPS:Precision Position System (精密測位・軍用) DGPS: Differential GPS (コード差分測位) KGPS: Kinematic GPS (位相測位) RTKGPS: Real Time Kinematic GPS (実時位相測位) VRSGPS: Virtual Reference Station GPS (仮想基地局RTKGPS)
これまでの測位方法の復習 • 単独測位とDGPS測位は、衛星から受信機までの電波伝播時間から擬似距離を測定して、位置を求める方法である。 • C/Aコードは1.023MHzで放送されているため、ビット長は約290mである。これを用いた擬似距離の計測精度は、ビット長の約1%といわれている. • ビット長の1%はC/Aコードでは3m、Pコードでは0.3mということになる。 • したがって、DGPSの1~5mの測位精度はC/Aコード測位の限界に達していることがわかる。 • DGPS以上の測位精度を求めるために、電波の波長を物差しとする位相測位(あるいは干渉測位)が必要となる。 • 位相測位のできるGPS受信機では、搬送波の位相を1%よりも精密に測定できる。 • L1バンドの波長は19cmなので、その1%は約1.9mmとなる。これは位相測位がcmないしmmの精度で測位できる所以である。
位相とは • 位相測位では受信機で受信された衛星からの搬送波は、位相同期ループに通され、受信機内で発生させた搬送波レプリカと比較して、2つの信号間の位相差が測定される。 • 位相差の測定は、受信機時計の秒信号に合わせて、あらかじめ設定した時刻で行われる。GPS時刻はエポック(Epoch)という。 位相角 2π 4π 6π λ 距離 2 λ 3λ サイクル数 1 2 3
位相差測位の原理 エポック エポック 基準波 時間 における衛星の移動 真の距離 伝搬時間 波長λ L1帯:19cm L2帯:24cm 受信機 エポック 搬送波レプリカ
二重位相差による測位 衛星j 衛星k 受信機A(既知点) 受信機B(未知点)
二重位相差の重要性 • 二重位相差には受信機の時計の誤差も消去され、未知点の3次元座標と整数値バイアス(Bias)の二重差だけが不定項として残っている。 • 整数値バイアスは時間に依存しないため、一度求めれば受信が中断しない限りその値は保持される。 • したがって、2つの衛星から1つの二重位相差が観測される。3つの座標不定項を求めるには4つの衛星を観測して3つの独立した二重位相差を得なければならない。 • 実際の測位では4つ以上の衛星を観測し、最小二乗法で解を求める。
測位方式と周波数の利用 • 整数値バイアスは一般に漸近法で求める。 • まず単独測位によるコード擬似距離から、未知点の座標の近似値を算出する。 • L1バンドとL2バンドを同時に使うと、整数値バイアスの候補は一気に数十個程度に絞られる。 • そして、候補の中から各種のアルゴリズムによって、整数値バイアスを推定する。 • 最後に、最小二乗法で残差の二乗和が最小になる整数値バイアスの組み合わせを選ぶ。 • 整数値バイアスが完全に決まる解をフィックス(Fix)解といい、決まらない解をフロート(Float)解という。
位相測位システム(RTKGPS)の構築 GPS衛星 GPS衛星 GPS衛星 GPS衛星 GPS衛星 移動局 基地局 COM2:補正情報を入力 COM1 アンテナ アンテナ COM1 電話回線 (COM2) 補正済み結果をパソコンモニターへ COM1 COM3 COM2 USBポート 補正情報を取り込み パソコン (補正信号をCom2へ) (補正信号をCOM2へ) パソコン GPSカード GPSカード
基線長と位相測位の精度 FIX解が取得することに必要な時間
仮想基準局GPS(VRSGPS) の概念 従来のRTKエリア VRS-RTKエリア 仮想基準局 (補正済) 基準局 RTK 移動局 30~100km
VRSGPSによる車載走行軌跡(内回りと外回、使用機器:Trimble5700)VRSGPSによる車載走行軌跡(内回りと外回、使用機器:Trimble5700)