ES220 Statics
420 likes | 801 Views
Equilibrium of Rigid Bodies. Chapter 4. Recall: Rigid Body Motion. TranslationCaused by Force(s):RotationCaused by Moment(s):A Force acting at a distance from a PointSeveral applied Moments:Determine magnitude and direction of single resultant moment, which determines direction of impending r

ES220 Statics
E N D
Presentation Transcript
1. ES220 Statics Exam II Review Notes
2. Equilibrium of Rigid Bodies Chapter 4
3. Recall: Rigid Body Motion Translation
Caused by Force(s):
Rotation
Caused by Moment(s):
A Force acting at a distance from a Point
Several applied Moments:
Determine magnitude and direction of single resultant moment, which determines direction of impending rotation.
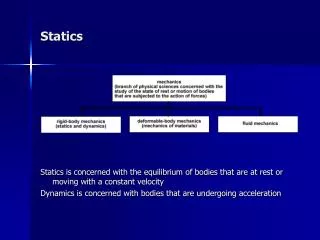
4. Static Equilibrium of Rigid Bodies A body at rest remains at rest
A body in motion continues to move in a straight line at constant velocity
Conditions for equilibrium:
is a vector pointing from point A to the point where acts
5. Moment of a Force about a Point Moment Vector:
Magnitude:
Position Vector:
Perpendicular distance = d
Moment vector is perpendicular to both r and F.
6. Forces Principal of Transmissibility:
Can slide a force along its line of action
Very useful in summing moments!
7. Determining Moments in 2D
8. Determining Moments in 2D Right Hand Rule:
9. Moment Vector
Position Vector: Determining Moments in 3D
10. Calculating a Vector Cross Product
11. Rigid Bodies A 2D or 3D bodies with dimensions
(Contrast with a point, which is infinitely small)
Systems of rigid bodies and supports
Externally applied forces or moments
Contact with other things:
Other rigid bodies
Supports, cables, etc.
Contact cause reaction forces or moments
12. Rigid Bodies in 2D 3 Equilibrium equations
Therefore, can solve for 3 unknowns
Examples:
Three support reactions
Unknown magnitudes of 3 forces, of known directions
Unknown magnitude of 1 force with known direction; unknown magnitude and direction of 1 force
14. Free Body Diagrams Choose body, detach from the ground, supports, connections, other bodies
Draw body and all external forces acting ON body.
Where body contacts ground, supports, connections, or other bodies, draw the appropriate reaction forces
Include weight of body, acting down through the center of gravity
Label the magnitude & direction of known forces
Identify unknown forces/reactions
Show the line of action, if known
Include dimensions, which are required in order to sum moments, SM = 0.
15. Hints for Free Body Diagrams Assume unknown forces act in positive direction
If answer is negative, you assumed the wrong direction, and force is in negative direction
Assume forces in cables and rods are tensile
If answer is negative, your assumption was wrong, and the rod is in compression
Note that cables can never be in compression!!
For summing moments:
Resolve forces into x and y components
Find perpendicular distance from force to the point about which you are summing the moment.
19. Two-Force Members Pinned at both ends (joints), with no applied loads between joints
Line of action of forces is directed along a line drawn between the two joints
20. Three Force Members Three forces are either
Concurrent (all 3 forces pass through a single point) (See next slide)
Parallel
21. Three Force Members: Concurrent Lines of action of the 3 concurrent forces intersect to form a triangle
Draw known lines of action of 2 forces to intersect at a point
Draw 3rd line of action: from point where 3rd force acts to intersection point
Use this triangle to find ?, the direction of the 3rd force
Knowing ?, use law of sines to find magnitudes of three forces
23. Rigid Bodies in 3D 6 Equilibrium equations
Therefore, can solve for up to 6 unknowns
We often had fewer than 6 unknowns
28. Centroids and Centers of Gravity Chapter 5
29. 2D: Composite Plates Break plate up into common shapes, for which centroid coordinates are known
Determine centroid of composite plate using:
33. 2D: Composite Wires Break wire up into line segments, for which centroid coordinates are known
Determine centroid of composite wire using:
35. 3D: Composite Bodies Break body up into common volumes, for which centroid coordinates are known
Determine centroid of composite body using:
40. 3D: Composite Plates/Sheets Break plate/sheet up into common shapes, for which centroid coordinates are known
Determine centroid of composite plate/sheet using:
41. 3D: Composite Wires Break wire up into line segments, for which centroid coordinates are known
Determine centroid of composite wire using: