Download
1 / 60
600 likes | 678 Views
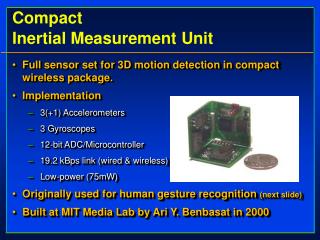
Mechatronics - Foundations and Applications Position Measurement in Inertial Systems. JASS 2006, St.Petersburg Christian Wimmer. Motivation Basic principles of position measurement Sensor technology Improvement: Kalman filtering. Content. Motivation. Johnnie: A biped walking machine

E N D
Mechatronics - Foundations and ApplicationsPosition Measurement in Inertial Systems JASS 2006, St.Petersburg Christian Wimmer Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation Basic principles of position measurement Sensor technology Improvement: Kalman filtering Content Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Johnnie: A biped walking machine • Orientation • Stabilization • Navigation Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Automotive Applications: • Drive dynamics Analysis • Analysis of test route topology • Driver assistance systems Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Aeronautics and Space Industry: • Autopilot systems • Helicopters • Airplane • Space Shuttle Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Military Applications: • ICBM, CM • Drones (UAV) • Torpedoes • Jets Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Maritime Systems: • Helicopter Platforms • Naval Navigation • Submarines Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Motivation • Industrial robotic Systems: • Maintenance • Production Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Measurement by inertia and integration: Acceleration Velocity Position • Measurement system with 3 sensitive axes • 3 Accelerometers • 3 Gyroscope Newton‘s 2. Axiom: F = m x a BASIC PRINCIPLE OF DYNAMICS Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles • Gimballed Platform Technology: • 3 accelerometers • 3 gyroscopes • cardanic Platform ISOLATED FROM ROTATIONAL MOTION TORQUE MOTORS TO MAINTAINE DIRECTION ROLL, PITCH AND YAW DEDUCED FROM RELATIVE GIMBAL POSITION GEOMETRIC SYSTEM Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles • Strapdown Technology: • Body fixed • 3 Accelerometers • 3 Gyroscopes Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles • Strapdown Technology: • The measurement principle SENSORS FASTENED DIRECTLY ON THE VEHICLE BODY FIXED COORDINATE SYSTEM ANALYTIC SYSTEM Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles • Reference Frames: • i-frame • e-frame • n-frame • b-frame Also normed: WGS 84 Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Interlude: relative kinematics Moving system: e P = CoM Vehicle‘s acceleration in inertial axes (1.Newton): Problem: All quantities are obtained in vehicle’s frame (local) Euler Derivatives! P O Differentiation: Inertial system: i cent trans rot cor Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Frame Mechanisation I: i-Frame Vehicle‘s velocity (ground speed) and Coriolis Equation: abbreviated: Differentiation: Applying Coriolis Equation (earth‘s turn rate is constant): subscipt: with respect to; superscript: denotes the axis set; slash: resolved in axis set Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Frame Mechanisation II: i-Frame Newton’s 2nd axiom: abbreviated: Recombination: i-frame axes: Substitution: subscipt: with respect to; superscript: denotes the axis set; slash: resolved in axis set Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Frame Mechanisation III: Implementation POSITION INFORMATION GRAVITY COMPUTER CORIOLIS CORRECTION RESOLUTION OF SPECIFIC FORCE MEASUREMENTS BODY MOUNTED ACCELEROMETERS NAVIGATION COMPUTER POSITION AND VELOVITY ESTIMATES POSSIBILITY FOR KALMAN FILTER INSTALLATION BODY MOUNTED GYROSCOPES ATTITUDE COMPUTER INITIAL ESTIMATES OF ATTITUDE INITIAL ESTIMATES OF VELOVITY AND POSITION Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles • Strapdown Attitude Representation: • Direction cosine matrix • Quaternions • Euler angles No singularities, perfect for internal computations singularities, good physical appreciation Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Strapdown Attitude Representation: Direction Cosine Matrix Axis projection: Simple Derivative: For Instance: With skew symmetric matrix: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Strapdown Attitude Representation: Quaternions Idea: Transformation is single rotation about one axis Components of angle Vector, defined with respect to reference frame Magnitude of rotation: Operations analogous to 2 Parameter Complex number Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Basic Principles Strapdown Attitude Representation: Euler Angles • Rotation about reference z axis through angle • Rotation about new y axis through angle • Rotation about new z axis through angle Gimbal angle pick-off! Singularity: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Accelerometers • Physical principles: • Potentiometric • LVDT (linear voltage differential transformer) • Piezoelectric Newton’s 2nd axiom: gravitational part: Compensation Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology Accelerometers Potentiometric - + Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Accelerometers • LVDT (linear voltage differential transformer) • Uses Induction Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology Accelerometers Piezoelectric Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Accelerometers • Servo principle (Force Feedback) • Intern closed loop feedback • Better linearity • Null seeking instead of displacement measurement 1 - seismic mass 2 - position sensing device 3 - servo mechanism 4 - damper 5 - case Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Gyroscopes • Vibratory Gyroscopes • Optical Gyroscopes Historical definition: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Gyroscopes: Vibratory Gyroscopes • Coriolis principle: • 1. axis velocity caused by harmonic oscillation (piezoelectric) • 2. axis rotation • 3. axis acceleration measurement • Problems: • High noise • Temperature drifts • Translational acceleration • vibration Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology Gyroscopes: Vibratory Gyroscopes Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Sensor Technology • Gyroscopes: Optical Gyroscopes • Sagnac Effect: • Super Luminiszenz Diode • Beam splitter • Fiber optic cable coil • Effective path length difference INTERFERENCE DETECTOR Beam splitter LASER MODULATOR Beam splitter Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
The Kalman Filter – A stochastic filter method Motivation: Uncertainty of measurement System noise Bounding gyroscope’s drift (e.g. analytic systems) Higher accuracy Kalman Filter Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
The Kalman Filter – what is it? Definition: Optimal recursive data processing algorithm. Optimal, can be any criteria that makes sense. Combining information: Knowledge of the system and measurement device dynamics Statistical description of the systems noise, measurement errors and uncertainty in the dynamic models Any available information about the initial conditions of the variables of interest Kalman Filter Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
The Kalman Filter – Modelization of noise Deviation: Bias: Offset in measurement provided by a sensor, caused by imperfections Noise: disturbing value of large unspecific frequency range Assumption in Modelization: White Noise: Noise with constant amplitude (spectral density) on frequency domain (infinite energy); zero mean Gaussian (normally) distributed: probability density function Kalman Filter Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Basic Idea: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: stochastic Basics (1-D) Mean value: Variance: Estimates: Mean of 2 Estimates (with weighting factors): Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: stochastic Basics (1-D) Weighted mean: Variance of weighted mean: Not correlated: Variance of weighted mean: Quantiles are independent! Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: stochastic Basics (1-D) Weighting factors: Substitution: Optimization (Differentiation): Optimum weight: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: stochastic Basics (1-D) Mean value: Variance: Multidimensional case: Covariance matrix: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Interlude: the covariance matrix 1-D: Variance – 2nd central moment N-D: Covariance – diagonal elements are variances, off-diagonal elements encode the correlations Covariance of a vector: n x n matrix, which can be modal transformed, such that are only diagonal elements with decoupled error contribution; Symmetric and quadratic Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Interlude: the covariance matrix applied to equations Equation structure: x, y are gaussian distributed, c is constant: Covariance of z: Linear difference equation: Covariance: with: Diagonal structure: since white gaussian noise Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: (n-D) Mean value: measurement: Mean value: Covariance with: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: (n-D) Covariance: Covariance: Minimisation of Variance matrix‘s Diagonal elements (Kalman Gain): For further information please also read: P.S. Maybeck: ‘Stochastic Models, Estimation and Control Volume 1’, Academic Press, New York San Francisco London Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Combination of independent estimates: (n-D) Mean value: Variance: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Interlude: time continuous system to discrete system Continuous solution: Substitution: Conclusion: Sampling time: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter The Kalman Filter: Iteration Principle CALCULATION OFKALMAN GAIN (WEIGHTING OF MEASUREMENT AND PREDICTION) PREDICTION OF ERROR COVARIANCE BETWEEN TWO ITERATIONS PREDICTION OF STATES (SOLUTION) BETWEEN TWO ITERATIONS DETERMINATION OF NEW SOLUTION (ESTIMATION) CORRECTION OF THE STOCHASTIC MODELLS TO NEW QUALITY VALUE OF SOLUTION PREDICTION NEXT ITERATION CORRECTION INITIAL ESTIMATION OF STATES AND QUALITY OF STATE Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Linear Systems – the Kalman Filter: Discrete State Model: Sensor Model: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Linear Systems – the Kalman Filter: 1. Step Prediction Prediction: State Prediction Covariance: Observation Prediction: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter Linear Systems – the Kalman Filter: 2. Step Correction Corrected state estimate: Corrected State Covariance: Innovation Covariance: Innovation: Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter The Kalman Filter: Kalman Gain Kalman Gain: State Prediction Covariance Innovation Covariance Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich
Kalman Filter The Kalman Filter: System Model + + - + Memory + + For linear systems: System matrices are timeinvariant Lecture: Position Measurement in Inertial Systems Christian Wimmer Technical University of Munich