Distance Estimation
This system uses 2 cameras to passively triangulate the object’s position and estimate distance, eliminating the need for costly active devices. The method involves selecting an object, processing images, and performing calculations to determine distance accurately on the horizontal plane. While accuracy may be lower than active systems, the system is affordable and adaptable to various setups.

Distance Estimation
E N D
Presentation Transcript
Distance Estimation Ohad Eliyahoo And Ori Zakin
Introduction • Current range estimation techniques require use of an active device such as a laser or radar. • Drawbacks of an active approach are: • Expensive • Use in military scenarios can compromise the measurers position. • Requires dedicated hardware
Introduction (cont) • Our System uses 2 cameras to triangulate the object’s position, and estimate the distance between the camera plane and the object. • Advantages: • Passive, based on passive image processing. • Cheap, only requires two cameras. • Can be implemented in any system that has two cameras, by adding appropriate software. For example, a robot can use this approach to estimate distance to objects in it’s path.
Introduction (cont) • The approach’s main disadvantage is accuracy compared to active systems.
Algorithm Phases • System configuration • Supply two different images of same object • Select object for distance estimation • Identify selected object in second image using image processing • Perform calculations and return result
Camera’s Focal Length Camera’s Diameter System configuration
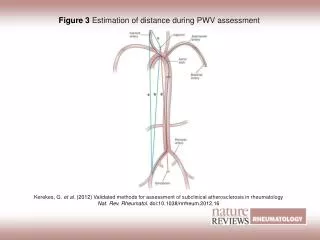
Angle of view Distance Congruent Area
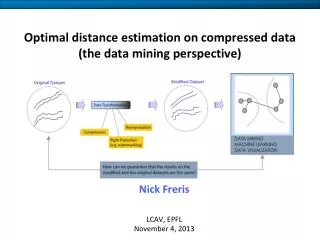
Processing Userselection Supply two different images of same object Left Right
R D Calculations
Summary • Increasing the distance between the cameras increases the accuracy of the system. • Our system measures distance on the horizontal plane only. • Our experiments were limited by out setup, a more controlled environment is needed to achieve more accurate results