Download
1 / 213
2.13k likes | 2.5k Views
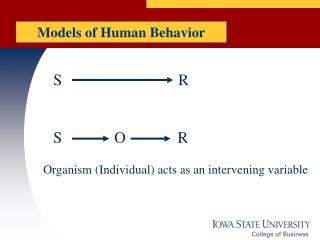
Models of Human Performance. CSCI 4800 Spring 2006 Kraemer. Objectives. Introduce theory-based models for predicting human performance Introduce competence-based models for assessing cognitive activity Relate modelling to interactive systems design and evaluation.

E N D
Models of Human Performance CSCI 4800 Spring 2006 Kraemer
Objectives • Introduce theory-based models for predicting human performance • Introduce competence-based models for assessing cognitive activity • Relate modelling to interactive systems design and evaluation
Seven Stage Action Model[Norman, 1990] GOAL OF PERSON
Describing Problem Solving • Initial State • Goal State • All possible intervening states • Problem Space • Path Constraints • State Action Tree • Means-ends analysis
Problem Solving • A problem is something that doesn’t solve easily • A problem doesn’t solve easily because: • you don’t have the necessary knowledge or, • you have misrepresented part of the problem • If at first you don’t succeed, try something else • Tackle one part of the problem and other parts may fall into place
Conclusion • More than one solution • Solution limited by boundary conditions • Representation affects strategy • Active involvement and testing
Functional Fixedness • Strategy developed in one version of the problem • Strategy might be inefficient X ) XXXX • Convert numerals or just ‘see’ 4
Data-driven perception Activation of neural structures of sensory system by pattern of stimulation from environment
Theory-driven perception Perception driven by memories and expectations about incoming information.
KEYPOINT PERCEPTION involves a set of active processes that impose: STRUCTURE, STABILITY, and MEANING on the world
Visual Illusions http://www.genesishci.com/illusions2.htm Rabbit or duck? Old Woman or Young girl?
Interpretation Knowledge of what you are “looking at” can aid in interpretation JA CKAN DJI LLW ENTU PTH EHI LLT OFE TCH APA ILO FWA TER Organisation of information is also useful
Story Grammars • Analogy with sentence grammars • Building blocks and rules for combining • Break story into propositions “Margie was holding tightly to the string of her beautiful new balloon. Suddenly a gust of wind caught it, and carried it into a tree. It hit a branch, and burst. Margie cried and cried.”
Story Grammar Story Episode Setting [1] Reaction Event Internal response Overt response Event Event [6] Event Event Event Event [sadness] [4] [3] [2] Change Of state [5]
Inferences • Comprehension typically requires our active involvement in order to supply information that is not explicit in the text 1. Mary heard the ice-cream van coming 2. She remembered her pocket money 3. She rushed into the house.
Inference and Recall • Thorndyke (1976): recall of sentences from ‘Mary’ story • 85% correct sentence • 58% correct inference – • sentence not presented • 6% incorrect inference
Mental Models • Van Dijk and Kintsch (1983) • Text processed to extract propositions, which are held in working memory; • When sufficient propositions in WM, then linking performed; • Relevance of propositions to linking proportional to recall; • Linking reveals ‘gist’
Semantic Networks Has Skin Can move Eats Breathes ANIMAL Can fly Has Wings Has feathers BIRD Has fins Can swim Has gills FISH Is Yellow Can sing CANARY Collins & Quillian, 1969
1.5 1.4 1.3 Property 1.2 Mean Reaction Time (s) Category 1.1 1 0.9 0 1 2 False Levels of Sentences Levels and Reaction time A canary can fly A canary has gills A canary can sing A canary has skin Collins & Quillian, 1969 A canary is a fish A canary is a canary A canary is a bird A canary is an animal
Canaries • Different times to verify the statements: • A canary is a bird • A canary can fly • A canary can sing • Time proportional to movement through network
Scripts, Schema and Frames • Schema = chunks of knowledge • Slots for information: fixed, default, optional • Scripts = action sequences • Generalised event schema (Nelson, 1986) • Frames = knowledge about the properties of things
Mental Models • Partial • Procedures, Functions or System? • Memory or Reconstruction?
Concepts • How do you know a chair is a chair? A chair has four legs…does it? A chair has a seat…does it?
Prototypes, Typical Features, and Exemplars • Prototype • ROSCH (1973): people do not use feature sets, but imagine a PROTOTYPE for an object • Typical Features • ROSCH & MERVIS (1975): people use a list of features, weighted in terms of CUE VALIDITY • Exemplars • SMITH & MEDIN (1981): people use an EXAMPLE to imagine an object
Representing Concepts • BARSALOU (1983) • TAXONOMIC • Categories that are well known and can be recalled consistently and reliably • E.g., Fruit, Furniture, Animals • Used to generate overall representation of the world • AD HOC • Categories that are invented for specific purpose • E.g., How to make friends, Moving house • Used for goal-directed activity within specific event frames
Long Term Memory • Procedural • Knowing how • Declarative • Knowing that • Episodic vs. Semantic • Personal events • Language and knowledge of world
Working Memory • Limited Capacity • 7 + 2 items (Miller, 1965) • 4 + 2 chunks (Broadbent, 1972) • Modality dependent capacity • Strategies for coping with limitation • Chunking • Interference • Activation of Long-term memory
Baddeley’s (1986) Model of Working Memory Central executive Visual Cache Inner scribe Phonological store Auditory word presentation Visual word presentation Articulatory control process
Slave Systems • Articulatory loop • Memory Activation • Rehearsal capacity • Word length effect and Rehearsal speed • Visual cache • Visual patterns • Complexity of pattern, number of elements etc • Inner scribe • Sequences of movement • Complexity of movement
Typing • Eye-hand span related to expertise • Expert = 9, novice = 1 • Inter-key interval • Expert = 100ms • Strategy • Hunt & Peck vs. Touch typing • Keystroke • Novice = highly variable keystroke time • Novice = very slow on ‘unusual’ letters, e.g., X or Z
Salthouse (1986) • Input • Text converted to chunks • Parsing • Chunks decomposed to strings • Translation • Strings into characters and linked to movements • Execution • Key pressed
Rumelhart & Norman (1982) • Perceptual processes • Perceive text, generate word schema • Parsing • Compute codes for each letter • Keypress schemata • Activate schema for letter-keypress • Response activation • Press defined key through activation of appropriate hand / finger
Schematic of Rumelhart and Norman’s connectionist model of typing middle index ring thumb little Right hand middle ring index little thumb Left hand Response system Keypress node, breaking Word into typed letters; Excites and inhibits nodes z z j a activation Word node, activated from Visual or auditory stimulus jazz
Automaticity • Norman and Shallice (1980) • Fully automatic processing controlled by SCHEMATA • Partially automatic processing controlled by either Contention Scheduling • Supervisory Attentional System (SAS)
Supervisory Attentional System Model Supervisory Attentional System Control schema Trigger database Perceptual System Effector System Contention scheduling
Contention Scheduling • Gear changing when driving involves many routine activities but is performed ‘automatically’ – without conscious awareness • When routines clash, relative importance is used to determine which to perform – Contention Scheduling • e.g., right foot on brake or clutch
SAS activation • Driving on roundabouts in France • Inhibit ‘look right’; Activate ‘look left’ • SAS to over-ride habitual actions • SAS active when: • Danger, Choice of response, Novelty etc.
Attentional Slips and Lapses • Habitual actions become automatic • SAS inhibits habit • Perserveration • When SAS does not inhibit and habit proceeds • Distraction • Irrelevant objects attract attention • Utilisation behaviour: patients with frontal lobe damage will reach for object close to hand even when told not to
Performance Operating Characteristics • Resource-dependent trade-off between performance levels on two tasks • Task A and Task B performed several times, with instructions to allocate more effort to one task or the other
Task Difficulty • Data limited processes • Performance related to quality of data and will not improve with more resource • Resource limited processes • Performance related to amount of resource invested in task and will improve with more resource
Data limited Resource limited POC P P Cost M Cost Task A Task A M Task B Task B
Why Model Performance? • Building models can help develop theory • Models make assumptions explicit • Models force explanation • Surrogate user: • Define ‘benchmarks’ • Evaluate conceptual designs • Make design assumptions explicit • Rationale for design decisions
Why Model Performance? • Human-computer interaction as Applied Science • Theory from cognitive sciences used as basis for design • General principles of perceptual, motor and cognitive activity • Development and testing of theory through models
Types of Model in HCI Whitefield, 1987
Task Models • Researcher’s Model of User, in terms of tasks • Describe typical activities • Reduce activities to generic sequences • Provide basis for design
Pros and Cons of Modelling • PROS • Consistent description through (semi) formal representations • Set of ‘typical’ examples • Allows prediction / description of performance • CONS • Selective (some things don’t fit into models) • Assumption of invariability • Misses creative, flexible, non-standard activity
Generic Model Process? • Define system: {goals, activity, tasks, entities, parameters} • Abstract to semantic level • Define syntax / representation • Define interaction • Check for consistency and completeness • Predict / describe performance • Evaluate results • Modify model
Device Models • Buxton’s 3-state device model State 2 State 1 State 0