Download

1 / 138
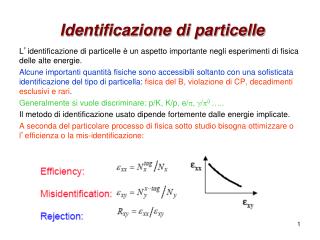
1.39k likes | 1.43k Views
Elettronica di Front End nei rivelatori di particelle. Corso di formazione per personale tecnico giugno – luglio 2011. Flavio Dal Corso I tecnologo INFN-Padova. Sommario. Introduzione Analog Signal processing nei rivelatori di particelle Breve ripasso di elettronica fondamentale

E N D
Elettronica di Front End nei rivelatori di particelle Corso di formazione per personale tecnico giugno – luglio 2011 Flavio Dal Corso I tecnologoINFN-Padova
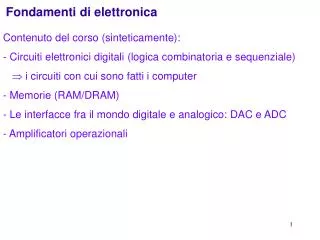
Sommario • Introduzione Analog Signal processing nei rivelatori di particelle • Breve ripasso di elettronica fondamentale • Transistors - BJT, JFET, MOSFET • La transconduttanza • Circuiti basilari • L’Amplificatore Operazionale • Funzione di trasferimento • Impedenza d’ingresso con reazione R||C • Teoria del rumore • Rumore come processo stocastico ergodico • Potenza del rumore e spettro di potenza • Trasformazione dello spettro di rumore nei sistemi lineari • Tipi di rumore • Johnson, Shot, Flicker • Rappresentazione del rumore nelle reti – relazione tre noise figure, temperatura di rumore e spettro del rumore • Rumore nei componenti • Resistori • BJT, JFET, MOSFET • Amplificatore Operazionale
Formazione del segnale nei rivelatori • Teorema di Shokley-Ramo • Soluzioni particolari • Blocchi funzionali di una catena analogica • Modello del detector – accoppiamento DC o AC • Preamplificatore • Disegno di un amplificatore di carica • Un amplificatore integrato custom • Shaper (filtro) • Teoria del filtro ottimo per misura di energia • Spettro di rumore in ingresso • Spettro di rumore in uscita • ENC • Forma del filtro ottimo • Altre cause di perdita di risoluzione • Panoramica sui filtri reali • Filtri semigaussiani a poli complessi coniugati • Uno shaper semigaussiano commerciale • Uno shaper semigaussiano integrato • Preamplificatori per situazioni particolari • Adattamento ottimale con rivelatori ad alta capacità • Matching capacitivo • Matching con trasformatore • Terminazione attiva
Un premaplificatore commerciale • Un premaplificatore a componenti discreti per rivelatore a bassa capacità • Filtro ottimo per misura del tempo • Read-out • Acquisizione • Sample & hold • Peak Detector • Pipeline Analogica • Conversione digitale • Wilkinson ADC • ADC ad integrazione Dual Slope • ADC ad inseguimento • ADC ad approssimazioni successive • Flash ADC • ΣΔ ADC • Riferimenti e bibliografia
Analog Signal Processingnei rivelatori di particelle • L’obbiettivo fondamentale del processamento dei segnali fornito dai rivelatori è estrarre le informazioni rilevanti dal “rumore” ovunque presente, ottenendo il migliore rapporto possibile tra il segnale utile e il rumore. • Sono due le quantità di maggior importanza che si possono estrarre dal segnale di un rivelatore: la sua ampiezza e il tempo di occorrenza. • L’ampiezza è correlata all’energia e al tipo di particella;la misura di tempo serve per lo più alla sua localizzazione (sebbene talvolta la posizione si ricavi da misure di “baricentro” delle ampiezze in canali contigui). • I rivelatori che qui ci interessano “rivelano” il passaggio di una particella dalla ionizzazione di un opportuno mezzo. Rilasciano quindi un segnale elettrico – tipicamente una certa quantità di carica elettrica – in qualche misura proporzionale all’energia della particella incidente.
Rivelatori che non producono un segnale elettrico (Čerenkov, transition radiation, scintillatori …) richiedono eventualmente un secondo stadio di rivelazione che trasformi il segnale originale in segnale elettrico (rivelatori ad effetto fotoelettrico: PM, MCP, SiPD, APD, HPD, SiPM …). Dal punto di vista dell’elettronica è quest’ultimo “il rivelatore”. • In altre situazioni la proporzionalità con l’energia è abbandonata a favore di un segnale più ampio, qualora serva solo la misura di posizione o di tempo sulla particella incidente; (RPC, LST, contatori Geiger …). In tali casi all’elettronica può non essere richiesta amplificazione e ottimizzazione del rapporto segnale/rumore, bastando una immediata digitalizzazione (discriminatori). • Nota sul termine “elettronica di front-end”Spesso (anche in questa dispensa) questa locuzione è usata per indicare complessivamente l’elettronica di processamento dei segnali analogici sviluppati dai rivelatori di particelle, mentre a stretto rigore di termini, essa dovrebbe indicare solo l’elettronica che riceve immediatamente il segnale del rivelatore e che è posta nelle sue immediate vicinanze. Solitamente solo uno stadio (preamplificatore o discriminatore) dell’intera catena di processamento risiede fisicamente vicino al rivelatore.
L’elettronica di front end può dover affrontare due diverse situazioni: • La carica è proporzionale all’energia della particella incidente (rivelatori proporzionali) • misura analogica della carica • misura analogica del tempo amplificatori di carica – filtro ottimo (a e b differiscono al livello del circuito di campionamento) • La proporzionalità con l’energia è abbandonata a favore di un segnale più ampio, e serve solo l’informazione sul tempo di occorrenza del segnale nel rivelatore (RPC, LST, contatori Geiger…) • misura digitale del tempo discriminatori • Questo corso sarà dedicato alle tecniche di processamento analogico finalizzate alla ottimizzazione delle misure di ampiezza e di tempo (punto 1), lasciando ad altra occasione le tecniche basate su discriminatori (punto 2)
A grandi linee possiamo intendere per “signal processing” la formazione del segnale nel rivelatore dovuta al passaggio della particella, la sua amplificazione e “formatura” (signal shaping) utili ad ottenere il migliore rapporto segnale/rumore, e il read-out. • Pertanto il corpo principale del corso sarà organizzato in tre parti: • studio della formazione del segnale nei rivelatori; • tecniche di processamento analogico, con particolare attenzione alle tecniche di disegno degli amplificatori di carica, e presentazione di una ampia panoramica sui filtri; • dedicata alle diverse tecniche di campionatura del segnale e di conversione analogico-digitale, limitatamente alla tecniche tradizionali di campionamento unico del segnale ad un istante ottimale, tralasciando tecniche più recenti (e poco usate nell’ambito dei rivelatori di particelle) di campionamento continuo e ricostruzione digitale del segnale. • Allo scopo di fornire gli strumenti necessari alla comprensione degli argomenti presentati, sarà premesso un breve richiamo di elettronica fondamentale sul funzionamento dei principali dispositivi, e un po’ di teoria del rumore, necessaria alla comprensione delle tecniche di ottimizzazione del rapporto segnale/rumore.
Breve ripasso del funzionamento dei transistors e amplificatori operazionali • Presenterò una essenziale descrizione del principio di funzionamento dei tre tipi di transistor – BJT, JFET, MOSFET – senza entrare nel dettaglio di tutte le varianti possibili (gli esempi e i disegni si riferiranno solo a dispositivi a canale n); introdurrò poi il concetto di transconduttanza, quindi presenterò alcuni circuiti base, necessari alla comprensione degli amplificatori che verranno illustrati in seguito. • Richiamerò poi brevemente l’amplificatore operazionale e svilupperò in qualche dettaglio le configurazioni tipicamente usate per realizzare i filtri dei processori analogici per rivelatori di particelle.
Il BJT A grandi linee il BJT può essere visto come una coppia di giunzioni PN contrapposte, in cui la sezione centrale di semiconduttore è estremamente sottile e la conformazione geometrica è tale per cui il collettore racchiude base ed emettitore. La giunzione base-emettitore è polarizzata direttamente, mentre la giunzione base-collettore è polarizzata inversamente. I portatori iniettati dall’emettitore, per lo spessore della base e la configurazione geometrica, hanno alta probabilità di attraversarla ed essere raccolti dal volume depleto della giunzione di collettore. Si ha quindi: con α prossimo a 1 e quindi Con β = 20 ÷ 500
β non è indipendente dalla corrente di collettore … … né dalla frequenza Il comportamento in dettaglio è definito dalle caratteristiche d’uscita (sin) e di trasferimento (dx)
Il JFET Il JFET è un dispositivo il cui la conduzione di corrente avviene nello spessore del semiconduttore (bulk), in un canale la cui sezione viene “strozzata” dalla zona di svuotamento della giunzione inversa del gate. La caratteristica d’uscita non è dissimile da quella del BJT, mentre è alquanto diversa quella di trasferimento. Quindi con il JFET si potrà realizzare un dispositivo da comportamento simile al BJT, ma con tensioni di gate diverse da quelle di base di un BJT.
Il MOSFET Il funzionamento del MOSFET si basa sullo stesso principio del JFET, salvo che il canale di conduzione è ricavato immediatamente sotto l’ossido di isolamento del gate. La caratteristica d’uscita è sostanzialmente identica a quella del JFET, mentre quella di trasferimento è assai variabile con il modello di MOS (enanchement o depletion mode) e livelli di drogaggio. Benché il MOS sia usato prevalentemente come interruttore (tra interdizione e zona ohmica), può operare come dispositivo analogico in zona di “saturazione” realizzando comportamenti non dissimili dal BJT e JFET Caratteristiche di un enanchement MOS a canale n. Per un depletion MOS la Vth scende a valori negativi, e il comportamento diviene quasi identico ad un JFET
La transconduttanza Tutti e tre i dispositivi illustrati agiscono come “modulatori” della corrente d’uscita (collettore o drain) in funzione della tensione d’ingresso (base o gate). I segnali applicati al transistor possono essere visti come piccole variazioni dei valori di polarizzazione, sufficientemente piccole da considerare lineare il comportamento del transistor rispetto ai segnali. Si conviene di indicare con lettere maiuscole i valori di polarizzazione e con minuscole i segnali. La transconduttanza è il rapporto tra il segnale d’uscita (corrente) e il segnale d’ingresso (tensione); è il “guadagno” del dispositivo: Si dimostra che per il BJT vale la relazione: Mentre per JFET e MOSFET gm dipende dalla geometria del dispositivo
Circuiti basilari Vediamo alcuni dei circuiti fondamentali che si possono costruire con i tre tipi di transistors, quasi dei “bulding blocks” con cui affronteremmo più avanti l’analisi di circuiti più complessi (nei disegni c’è un JFET, ma potrebbe essere indifferentemente un BJT o un MOS). Amplificatore a singolo transistor (configurazione Common Emitter/Source) Common Base/Gate Si dimostra che per tutti i tre tipi di dispositivo l’impedenza d’ingresso di emettitore/source è ≈1/gm. Quindi, se R>>1/gm, il trasferimento di corrente di questo circuito vale (nel BJT si trascura la corrente di base):
Emitter/Source Follower Si dimostra che se R>>1/gm, per tutti i tre tipi di dispositivo vale la relazione: Poiché l’impedenza d’ingresso è alta (104-106 Ω per BJT; 1010 -1014Ωper JFET e MOS) e quella d’uscita è bassa, il circuito “adatta” l’impedenza della sorgente al carico. Cascode e Folded Cascode Usando la definizione di gm e le proprietà del common base/gate, per questi circuiti si ha: Quindi non modificano la transconduttanza del dispositivo d’ingresso, ma ne migliorano molto la risposta in frequenza, perché inibiscono l’effetto della capacità di drain.Il folded cascode permette anche di aumentare la dinamica d’uscita.
Generatori di corrente Esiste un’ampia gamma di circuiti cheemulano un generatore di corrente ideale, quindi con alta impedenza. Tutti generano corrente dal collettore/drain, che è un terminale ad alta impedenza (la corrente è ≈ indipendente dalla sua tensione). Le migliori configurazioni arrivano ad impedenze dell’ordine di 107Ω. Vengono usati come elementi di polarizzazione di un circuito o come carichi attivi per spingere l’amplificazione senza necessità di usare alte resistenze.
MOS come resistori Un MOS polarizzato nella regione ohmica può sostituire una resistenza (con grande risparmio di silicio, nei circuiti integrati). Il comportamento non sarà molto lineare, ma dove non è critica la precisione, offrono un grande vantaggio alla densità di integrazione.
Coppia differenziale È il circuito d’ingresso degli amplificatori operazionali. È costituito da una coppia di dispositivi (BJT, JFET o MOS) identici, accoppiati in emettitore/source, polarizzati con un generatore di corrente sul nodo comune. È sostanzialmente insensibile alla tensione di modo comune ed amplifica solo la tensione differenziale: Al variare del tipo di dispositivo cambia solo l’ampiezza della zona lineare: MOSFET BJT JFET
Amplificatore operazionale È un amplificatore differenziale con elevato guadagno (anche oltre 106). Di conseguenza gli ingressi sono quasi equipotenziali, pure essendo tra loro isolati; si dice che sono in contatto “virtuale”. Con gli operazionali si realizzano una grande varietà di funzioni, che non possiamo qui analizzare. Mi limiterò a presentare alcuni concetti ed alcuni circuiti utili all’analisi di un processore analogico di segnali da rivelatori. Nella configurazione più comune le funzioni di trasferimento rispetto ai due ingressi sono:
Configurazione tipica – impedenza d’ingresso Usualmente, nelle nostre applicazioni, l’ingresso non invertente è posto a massa. Esso quindi diviene un amplificatore invertente ad alto guadagno, privo (idealmente) di offset in uscita. Nel primo stadio dell’elettronica di front end è richiesto un amplificatore invertente ad elevato guadagno, che quindi potrebbe essere fatto con un operazionale con ingresso non invertente a massa, ma diverse ragioni sconsigliano questa scelta. L’amplificatore viene quindi realizzato con il solo ingresso invertente, il che comporta che abbia un considerevole offset. Negli stadi successivi, invece, è conveniente usare amplificatori operazionali commerciali. Inoltre l’amplificatore di front end viene usato come integratore, quindi con reazione R||C (resistore, di alto valore, in parallelo ad un condensatore).
È interessante valutare l’impedenza d’ingresso dell’amplificatore, nel caso sia realizzato con un OpAmp commerciale oppure con un tipico preamplificatore da front end. Per il teorema di Miller, l’impedenza d’ingresso vale: quindi è come se all’ingresso ci fosse, verso massa, un condensatore ACf molto grande (essendo A molto grande), che è la condizione ideale per un integratore. Compare anche un resistore Rf/A, che disturba, ma è inevitabile; nell’assunzione che Rf ∞ essa è trascurabile. Ma valutiamo come l’impedenza varia con la frequenza.
La risposta in frequenza dell’amplificatore può, con buona precisione, essere descritta in termini del suo polo dominante: Espressa anche l’impedenza di feedback in termini del suo polo ωf=1/RfCf essa diviene: Che può essere riscritta così:
Proviamo una stima numerica in queste condizioni: • Zf data da: • Rf=100 MΩ • Cf=1pF • ωf=104 s-1 • OpAmp commerciale con • A0=120dB (=106) • ω0=314 s-1 ( GBW=50MHz) Il modulo dell’impedenza è illustrato nella figura sottostante. Si vede che fino a ω0 (50 Hz) l’impedenza è resistiva e bassa (100 Ω), poi cresce con andamento induttivo fino a ωf (1590 Hz), dove riprende andamento resistivo con valore relativamente alto (3184 Ω). Prende a decrescere con andamento capacitivo solo a frequenza A0ω0 (50 MHz). Il risultato è che, nelle frequenze interessanti, è come se il segnale del rivelatore venisse raccolto su una R||C con R≈kΩ e C=Cf, che non è proprio la soluzione ideale!
Vediamo ora cosa succede usando un amplificatore da front end: • Zf come prima • Amplificatore invertente con • A0=60dB (=103) • ω0=3,14·106 s-1 ( GBW=500MHz) Ora l’impedenza è resistiva e pari a Rf/A0 fino a ωf, dove diventa capacitiva. Il risultato netto è, nelle frequenze di interesse, un impedenza d’ingresso dato da una R||C con R=Rf/A0 che rimane abbastanza alta, e C=Cf·A0, che è ciò che si desidera. Il trucco sta nell’avere il polo dominante dell’amplificatore più alto del polo del feedback; ω0>>ωf. Tra ω0 e Aoω0 l’impedenza ritorna resistiva, ma a queste frequenze non si può più (come implicitamente è stato fatto) trascurare la capacità del dispositivo d’ingresso. Una situazione interessante si ha quando ω0=ωf. Verrà ripresa in considerazione più avanti.
Un po’ di teoria sul Rumore in elettronica La teoria del rumore è ritenuta una disciplina oscura e difficile; cercherò di dare qualche informazione, senza eccessiva pretesa di rigore. Debbo presumere alcune conoscenze di analisi statistica, teoria dei circuiti, trasformate di Fourier e Laplace. In un sistema elettronico rumoreè qualsiasi segnale che si sovrappone al segnale utile, ostacolandone le misura. Possiamo distinguere tra rumore deterministico, causato essenzialmente da interferenze con altri sistemi o variazioni di parametri ambientali, che in linea di principio (molto teoricamente) può essere analizzato in modo totalmente deterministico e rimosso. Non verrà preso in considerazione in questo corso, ma rimando ad una fonte fondamentale al rif. 7,e rumore casuale, che non può essere analizzato se non in termini statistici e non può mai essere totalmente rimosso, perché intimamente connesso alle proprietà fisiche fondamentali dei componenti elettronici.
Rumore come processo stocastico ergodico • La forma d’onda del rumore, come ciò che si vede all’oscilloscopio quando la sonda è connessa ad un circuito privo di segnale, è una funzione del tempo dalla forma irregolare e del tutto imprevedibile. • Diciamo che è un processo casuale, e lo chiamiamo n(t). Comunemente per descriverlo usiamo un unico valore: la deviazione standard (o valore rms), ma nel fare ciò facciamo implicitamente alcune assunzioni non banali: • Assumiamo che la distribuzione statistica di n(t) sia indipendente dal tempo • Assumiamo che la distribuzione sia gaussiana con media nulla • Assumiamo anche a priori che tale distribuzione esista per qualsiasi circuito ed in qualsiasi circostanza. • Sono assunzioni che ci detta l’esperienza, ma su quali principi fisici e matematici si fondano?
Per fissare le idee, poniamo che n(t) sia la tensione ai capi di una resistenza. A causa dell’agitazione termica degli elettroni e degli atomi, in generale sarà n(t)≠0. Operativamente, come determiniamo la statistica di n(t), ad esempio la media? • Possiamo prendere una schermata sufficientemente lunga all’oscilloscopio e valutarne la media (statistica temporale). • Oppure possiamo prendere molti campioni a tempi sufficientemente lontani tra loro da poter assumere che siano statisticamente indipendenti, e farne la media (statistica d’insieme). Se facciamo bene le cose (a meno di variazioni delle condizioni ambientali), l’esperienza ci dice che otteniamo lo stesso risultato. In realtà non è neppure raro che le misure non tornino, perché non sappiamo bene cosa voglia dire, nelle preposizioni suddette, l’avverbio “sufficientemente”. Come determinarne la statistica di n(t) senza fare assunzioni che non sappiamo giustificare?
Poiché la resistenza è un insieme di ≈1023 particelle in equilibrio termodinamico con l’ambiente, il cui microstato è impossibile da determinare, si usano alcuni concetti della meccanica statistica(10). Si ricorre ad un esperimento ideale, immaginando di disporre di un insieme arbitrariamente grande di resistenze identiche (statistical ensemble), idealmente una per ciascun dei microstati possibili della resistenza. Avremmo quindi a disposizione un insieme {ni(t)} di processi casuali. L’insieme, pensato come un tutt’uno, è chiamato processo stocastico. processo stocastico = {ni(t)} Il processo stocastico descrive, quindi, l’evoluzione temporale di tutti i microstati possibili del sistema. Ad ogni istante possiamo calcolare le grandezze statistiche del processo (media, rms, densità di probabilità …) operando sugli elementi dell’insieme (statistica d’insieme), e saranno in genere funzione del tempo.
Ad esempio, la media d’insieme degli ni può essere espressa come: |{ni}| indica la cardinalità dell’insieme {ni}, p(n) è la densità di probabilità di {ni}, E sta per “expected value” ed è, in genere, funzione del tempo. Quando invece le grandezze statistiche d’insieme risultano indipendenti dal tempo, il processo stocastico è detto stazionario. Alternativamente alla statistica d’insieme, per un processo stazionario si può valutare la statistica temporale. Ad esempio la media temporale è espressa come: ed è una variabile casuale (dipende dall’indice i ma non dal tempo), i cui valori di aspettazione sono difficili da esprimere analiticamente.
Vi sono tuttavia dei processi in cui le due tecniche di calcolo conducono allo stesso risultato; per esempio per la media: cioè le medie temporali sono tutte uguali e coincidono con le medie d’insieme, che non dipendono dal tempo. Tali processi sono detti ergodici. Sintetizzando, possiamo quindi definire ergodico un processo stocastico in cui le medie d’insieme sono uguali alle medie temporali. Di conseguenza, tutte le proprietà statistiche di un processo ergodico possono essere determinate per mezzo di una singola funzione del processo.
Il postulato fondamentale relativo all’analisi del rumore è che esso sia un processo ergodico. Il fondamento della ragionevolezza del postulato sta nel fatto che assumiamo la sorgente di rumore attiva ab eterno e, per il principio di omogeneità del tempo, immutabili nel tempo le sue proprietà (a condizioni ambientali ferme, ovviamente). Si deve poi assumere che il valore medio del rumore sia nullo, per non violare qualche principio fondamentale (la tensione di rumore di una resistenza deve avere media nulla, per evitare che essa diventi una sorgente gratuita di energia). Infine, si deve ritenere che la distribuzione di probabilità del rumore sia gaussiana: questo assunto è conseguenza del teorema del limite centrale e del fatto che il rumore dipende da un grandissimo numero di fattori casuali. Va comunque detto che alcune grandezze si definiscono più facilmente nella statistica d’insieme (caso notevole, la densità di probabilità), altre nella statistica temporale (caso notevole, l’autocorrelazione).
Riassumendo, il rumore è un processo casuale con queste proprietà: • È ergodico • Ha media nulla • Ha distribuzione normale (gaussiana) • È quindi completamente determinato statisticamente da un solo parametro; la sua varianza (o dal valore rms, che della varianza è la radice quadrata).
Potenza del rumore e spettro di potenza La varianza del rumore è chiamata potenza di rumore. Può essere espressa sotto forma di un integrale nella frequenza: W(ν) è detto spettro dellapotenza di rumore, ed esprime la potenza di rumore per unità di banda di frequenza. Lo spettro di potenza è uno strumento fondamentale nell’analisi del rumore. I datasheets dei componenti spesso riportano questo parametro (nella forma della sua radice quadrata), oppure la noise figure, che è ad esso legato, come vedremmo.
Teorema di Wiener-Khintchine Lo spettro di potenza è esprimibile in termini della trasformata di Fourier della autocorrelazione del rumore, cioè: con L’autocorrelazione è una grandezza statistica la cui prima definizione avviene nel dominio della statistica d’insieme, ed esprime la correlazione tra due valori della stessa variabile casuale, calcolati un due istanti diversi. Dà quindi una misura di quanto lontani debbano due campioni di una stessa variabile casuale per essere statisticamente indipendenti. Per i processi ergodici l’autocorrelazione è funzione solo di t2-t1=τ e si può esprimere con una media temporale: Si vede subito che:
Dimostrazione. Data l’anti-trasformata di Fourier di R(τ): poiché R(τ) è reale e simmetrica, anche S(ω) lo è. Allora il secondo integrale è nullo e il primo può essere scritto: che per τ=0 dà:
Trasformazione del rumore nei sistemi lineari Un sistema elettrico lineare tempo-invariante deterministico (= privo di rumore) può essere descritto mediante un operatore lineare: Si dimostra che se x(t) è un processo ergodico, anche L[x(t)]=y(t) lo è, purché il circuito sia attivo da sempre (ovvero, in pratica, sia esaurito il transitorio). Lo studio del rumore non prevede l’analisi al transitorio, per tale ragione si usa la trasformata di Fourier e non quella di Laplace. Il comportamento del circuito è descritto anche dalla sua risposta all’impulso h(t) o dalla sua funzione di trasferimento H(iω), legate dalla trasformata di Fourier:
Per i segnali deterministici applicati al circuito, valgono le ben note relazioni (la lettera maiuscola indica la trasformata della corrispondente variabile con lettera minuscola): Per il rumore si dimostra una formula analoga, che esprime lo spettro di rumore in uscita in funzione di quello d’ingresso: È una formula fondamentale nell’analisi del rumore. In una catena di sistemi posti in cascata, lo spettro di rumore del primo stadio dà il maggior contributo al rumore totale, rispetto alle sorgenti intermedie, che subiscono una amplificazione minore. Per questo ragione l’analisi del rumore dei circuiti si concentra particolarmente sullo stadio d’ingresso.
Dimostrazione della Dalla: moltiplico prima per x(t-θ)e poi per y(t+θ),e valuto i valori d’aspettazione dei due risultati (media d’insieme). le medie sono rispettivamente la correlazione tra x e y e l’autocorrelazione di x e di y,e dipendono solo dalla differenza dei tempi (processi stazionari).
Quindi si ha (* indica la convoluzione): Passando alle trasformate di Fourier e osservando che F[h(-t)]=H*(iω): Combinando i risultati: Ricordando il teorema di W-K:
Nota sull’integrale di convoluzione • La formula di convoluzione permette di calcolare nel dominio del tempo la risposta di un circuito. • La formula più usuale e nota è quella nel dominio della variabile di Laplace: • Ovvero, l’uscita del circuito è data dall’ingresso, moltiplicato per la funzione di trasferimento, o “guadagno”, del circuito. • Poiché con il rumore si opera sempre in regime stazionario, alla variabile s si sostituisce iωe si lavora con la trasformata di Fourier, anziché quella di Laplace. • Ciò che nel dominio delle frequenze è un prodotto, nel domino del tempo, cioè delle anti-trasformate, diventa un integrale di convoluzione: • Ovvero, il segnale d’uscita del circuito è dato dalla convoluzione del segnale d’ingresso con la risposta all’impulso del circuito.
Il calcolo dell’integrale di convoluzione può essere talvolta molto arduo (ma allora si opera nello spazio delle trasformate, dove diventa un banale prodotto), però lo si può rappresentare, molto intuitivamente, in maniera grafica. • Fissando le idee sulla prima forma dell’integrale: • lo si può interpretare come l’integrale delle due funzioni (di cui la prima è l’immagine riflessa del segnale d’ingresso), fatte “scivolare” l’una rispetto all’altra. • Forse la cosa è più chiara passando dal tempo continuo al tempo discreto e alle funzioni campionate ad intervalli Δt. Allora l’integrale diventa: • Con questa formula ho fatto un esercizio numerico e cercato di visualizzare come la convoluzione si costruisce
Si ottiene una cosa del genere: • La convoluzione finale è questa:
Tipi di Rumore • Il rumore esibito dai componenti fisici si descrive mediante tre modelli fondamentali di rumore: • Rumore termico o Johnson; causato dall’agitazione termica dei portatori nei conduttori • Rumore granulare o shot; compare con correnti dovute a pochi portatori che attraversano in tempi brevissimi una barriera di potenziale, generando una successione casuale di impulsi di corrente. • Rumore 1/f o Flicker; comprende un’ampia gamma di sorgenti di rumore, spesso di origine poco chiara, che mostrano uno spettro di tipo 1/fα con α prossimo a 1. • Nei componenti fisici reali vi può essere un tipo di rumore dominante, ma possono essere anche tutti compresenti.
Rumore Johnson Ai capi di un resistore R in equilibrio termico alla temperatura T compare una tensione di rumore dovuta al moto casuale degli elettroni di conduzione. Questo fenomeno fu studiato sperimentalmente da J.B. Johnson nel 1928 (11) e lo spettro di potenza fu ben presto determinato da H. Nyquist (12). La resistenza connessa ad un circuito, e con esso in equilibrio termico, a causa del rumore scambia con esso energia, con una potenza per unità di banda di frequenza data da: Per tutte le frequenze di interesse in elettronica, questo spettro è “bianco” cioè indipendente dalla frequenza. dP(f) a T=10, 20, 40, 80, 160, 320 °K
Una resistenza reale è allora rappresentata da una resistenza ideale (priva di rumore) con un generatore di tensione in serie, o un generatore di corrente in parallelo (teorema di Thevenin-Norton), tali da generare rumore con la stessa potenza. Lo spettro di potenza dei due generatori vale allora: Vale la pena di rimarcare che, ricordando come lo spettro di potenza è legato alla varianza della rispettiva variabile di rumore, le dimensioni di Win sono A2/Hz e quelle di Wen sono V2/Hz
Rumore Shot Si ha quando la corrente è dovuta a pochi portatori che generano brevi impulsi con occorrenza casuale. È un fenomeno importante nella emissione di elettroni da fotocatodi, nelle valvole termoioniche, nelle correnti di portatori minoritari (correnti di gate nei JFET e MOSFET, e di base nei BJT). Viene descritto mediante la statistica di Poisson, con la quale si calcola media e varianza della corrente: • Corrente media (q = carica dell’elettronef = frequenza media degli impulsi) • Varianza della corrente
Come intuibile, la varianza della corrente è tanto più piccola quanto è lungo l’intervallo Δt di osservazione. Per calcolare spettro del rumore shot bisogna trovare l’autocorrelazione del processo che lo descrive e trasformarla secondo Fourier. Trattando gli impulsi di corrente come delta di Dirac, si ottiene che: (cfr. rif. 10 pag. 350): È anche questo un rumore bianco, nel limite in cui regge l’approssimazione degli impulsi come delta di Dirac; quindi fino a frequenze dell’ordine dell’inverso della durata degli impulsi.
Rumore Flicker Un un’ampia serie di fenomeni, non solo fisici ed elettronici, mostrano fluttuazioni di ampiezza crescente all’aumentare del tempo di osservazione, descrivibili come un rumore con uno spettro proporzionale a 1/f,. Le cause fisiche del rumore 1/f sono spesso oscure; sappiamo che resistori a carbone mostrano più rumore 1/f rispetto a quelli metallici, e se ne imputa la causa alle discontinuità di resistività dovuta ai contati più o meno buoni tra i granuli della pasta resistiva di cui essi sono composti. Nei dispositivi a semiconduttore il rumore 1/f cresce al crescere dei difetti reticolari. Di conseguenza, dispositivi a conduzione superficiale (i.e. MOS) hanno più rumore 1/f dei dispositivi a conduzione di bulk (i.e. BJT e JFET). Va infine detto che il rumore 1/f è assolutamente presente ovunque. La trattazione teorica del rumore 1/f è complessa,(13) (14) perché non può essere considerato un processo stazionario. La sua varianza diverge verso le basse frequenze; questa “catastrofe” è evitata perché in realtà nessun circuito ha banda che si estende a frequenza zero.
Dal punto di vista pratico, le prestazioni dei dispositivi sono caratterizzate dalla frequenza di 1/fnoise corner, sopra la quale il rumore 1/f diventa trascurabile rispetto al rumore bianco. Nelle applicazioni pratiche si cerca di minimizzare l’effetto del rumore 1/f, mantenendo le frequenze di interesse sopra il noise corner. Esso può essere un problema serio per circuiti in continua ad alta sensibilità, p.es. generatori di tensioni di riferimento, che notoriamente sono soggetti a lente pendolazioni e richiedono periodiche calibrazioni. Nei nostri circuiti, osservata l’avvertenza di stare sopra il noise corner, solitamente il rumore 1/f è trascurato. Slope = -1/2 LMP7731 Bipolar input OpAmp equivalent input noise voltage LMV793 MOS input OpAmp equivalent input noise voltage