Download
1 / 23
510 likes | 2.25k Views
Chapter 1. Equilibrium and Stability of the human body: 1.1 Introduction 1.2 Equilibrium Considerations for the Human Body 1.3 Stability of the Human Body under the Action of an External Force 1.4 Muscles 1.5 Levers 1.6 Elbow. 1. Introduction. Center of mass and base of support.

E N D
Chapter 1. Equilibrium and Stability of the human body: 1.1 Introduction 1.2 Equilibrium Considerations for the Human Body 1.3 Stability of the Human Body under the Action of an External Force 1.4 Muscles 1.5 Levers 1.6 Elbow
1. Introduction Center of mass and base of support The position of the center of mass with respect to the base of support determines whether the body is stable or not. A body is in stable equilibrium under the action of gravity if its center of mass is directly over its base of support (Fig. 1.1). Under this condition, the reaction force at the base of support cancels the force of gravity and the torque produced by it. If the center of mass is outside the base, the torque produced by the weight tends to topple the body (Fig. c).
If the wide-based body in Fig. 1.1a is displaced as shown in Fig. 1.2a, the torque produced by its weight tends to restore it to its original position (Fr is shown the reaction force exerted by the surface on the body). Similar considerations show that a body is more stable if its center of gravity is closer to its base. restore
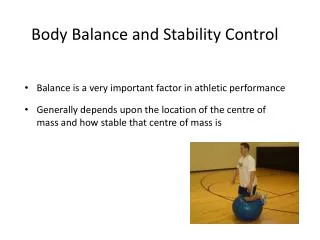
1.2 Equilibrium Considerations for the Human Body The center of gravity (c.g.) of an erect person with arms at the side is at approximately 56% of the person’s height measured from the soles of the feet. The center of gravity shifts as the person moves and bends. Center of gravity for a person.
When carrying an uneven load, the body tends to compensate by bending and extending the limbs so as to shift the center of gravity back over the feet. For example, when a person carries a weight in one arm, the other arm swings away from the body and the torso bends away from the load. A person carrying a weight This tendency of the body to compensate for uneven weight distribution often causes problems for people who have lost an arm, as the continuous compensatory bending of the torso can result in a permanent distortion of the spine. It is often recommended that amputees wear an artificial arm, even if they cannot use it, to restore balanced weight distribution.
1.3 Stability of the Human Body under the Action of an External Force Let us calculate the magnitude of the force applied to the shoulder that will topple a person standing at rigid attention. The assumed dimensions of the person are as shown in Fig. 1.5. In the absence of the force, the person is in stable equilibrium because his center of mass is above his feet, which are the base of support. The applied force Fa tends to topple the body. When the person topples, he will do so by pivoting around point A—assuming that he does not slide. The counterclockwise torque Ta about this point produced by the applied force is Ta=Fa ×1.5m The opposite restoring torque Tw due to the person’s weight is Tw=W×0.1m Assuming that the mass m of the person is 70 kg, his weight W is W= mg =70×9.8 = 686 newton (N) (Here g is the gravitational acceleration, which has the magnitude 9.8m/sec2.)
Ta=Fa ×1.5m Tw=W×0.1m Ta=Tw or Fa ×1.5m= 68.6 N/m Therefore, the force required to topple an erect person is Fa = 68.6/1.5=45.7 N W= mg =70×9.8 = 686 newton (N)
The restoring torque produced by the weight is therefore 68.6 newton-meter (N/m). The person is on the verge of toppling when the magnitudes of these two torques are just equal; that is, Ta=Tw or Fa ×1.5m= 68.6 N/m Therefore, the force required to topple an erect person is Fa = 68.6/1.5=45.7 N
Why the stability against a toppling force is increased by spreading the legs? ??????
1.4 Muscles The muscles producing skeletal movements consist of many thousands of parallel fibers wrapped in a flexible sheath that narrows at both ends into tendons. The tendons (الاوتار), which are made of strong tissue, grow into the bone and attach the muscle to the bone.
1.4 Muscles Most muscles taper to a single tendon. But some muscles end in two or three tendons; these muscles are called, respectively, biceps and triceps. Each end of the muscle is attached to a different bone.
When fibers in the muscle receive an electrical stimulus from the nerve endings that are attached to them, they contract. This results in a shortening of the muscle and a corresponding pulling force on the two bones to which the muscle is attached. There is a great variability in the pulling force that a given muscle can apply. The force of contraction at any time is determined by the number of individual fibers that are contracting within the muscle. When an individual fiber receives an electrical stimulus, it tends to contract to its full ability. If a stronger pulling force is required, a larger number of fibers are stimulated to contract.
1.5 Levers A lever is a rigid bar free to rotate about a fixed point called the fulcrum. The position of the fulcrum is fixed so that it is not free to move with respect to the bar. Levers are used to lift loads in an advantageous way and to transfer movement from one point to another. There are three classes of levers. The three classes of lever.
1.5 Levers There are three classes of levers. In a Class 1 lever, the fulcrum is located between the applied force and the load. A crowbar is an example of a Class 1 lever. By placing the load close to the fulcrum, with d1 much smaller than d2, a very large mechanical advantage can be obtained with a Class 1 lever.
1.5 Levers There are three classes of levers. In a Class 2 lever, the fulcrum is at one end of the bar; the force is applied to the other end; and the load is situated in between. In a Class 2 lever, d1 is always smaller than d2; therefore, the mechanical advantage of a Class 2 lever is greater than one.
1.5 Levers The force is applied between the two ends. As we will see, many of the limb movements of animals are performed by Class 3 levers. The situation is opposite in a Class 3 lever. Here d1 is larger than d2; therefore, the mechanical advantage is always less than one. It can be shown from the conditions for equilibrium that, for all three types of levers, the force F required to balance a load of weight W is given by:
where d1 and d2 are the lengths of the lever arms, If d1 is less than d2, the force required to balance a load is smaller than the load. The mechanical advantage M of the lever is defined as
A force slightly greater than what is required to balance the load will lift it. As the point at which the force is applied moves through a distance L2, the load moves a distance L1. The relationship between L1 and L2, is given by Motion of the lever arms in a Class 1 lever. The ratio of velocities of these two points on a moving lever is likewise given by Here v2 is the velocity of the point where the force is applied, and v1 is the velocity of the load. These relationships apply to all three classes of levers. Thus, it is evident that the excursion and velocity of the load are inversely proportional to the mechanical advantage.
1.6 Elbow The two most important muscles producing elbow movement are the biceps and the triceps . The contraction of the triceps causes an extension, or opening, of the elbow, while contraction of the bicepscloses the elbow. The elbow. In our analysis of the elbow, we will consider the action of only these two muscles.
Lever representation of Fig. 1.12. (a) Weight held in hand. (b) A simplified drawing of (a). The first shows a weight W held in the hand with the elbow bent at a 100◦ angle. A simplified diagram of this arm position is shown in the first fig. b. The weight pulls the arm downward. Therefore, the muscle force acting on the lower arm must be in the up direction. Accordingly, the prime active muscle is the biceps???? We will calculate, under the conditions of equilibrium, the pulling force Fm exerted by the biceps muscle and the direction and magnitude of the reaction force Fr at the fulcrum.
The calculations will be performed by considering the arm position as a Class 3 lever. The direction of the reaction force Fr shown is a guess. The exact answer will be provided by the calculations. In this problem we have three unknown quantities: the muscle force Fm , the reaction force at the fulcrum Fr , and the angle of this force φ (direction). The angle θ of the muscle force can be calculated from trigonometric considerations, without recourse to the conditions of equilibrium. For equilibrium, the sum of the x and y components of the forces must each be zero. From these conditions we obtain Lever representation of Fig. 1.12. Fm cos θ = Fr cos φ x components of the forces : y components of the forces : Fm sin θ= W+Fr sin φ
These two equations alone are not sufficient to determine the three unknown quantities. The additional necessary equation is obtained from the torque conditions for equilibrium. In equilibrium, the torque about the fulcrum must be zero. For convenience, we will choose the fulcrum as the point for our torque balance. There are two torques about this point: a clockwise torque due to the weight and a counterclockwise torque due to the vertical y component of the muscle force. Since the reaction force Fr acts at the fulcrum, it does not produce a torque about this point. Lever representation.
With my best wishes Dr. Mohamed Rashad mrashad776@gmail.com