Download
1 / 27
270 likes | 449 Views
Collimators and Beam Absorbers for Cleaning and Machine Protection. Ralph Assmann Workshop Chamonix XIV 17-21.01.2005 Acknowledgements to the members of the Collimation Project, the Collimation WG and the Machine Protection WG!. Collimators and Protection Devices. CLEANING (continuous).

E N D
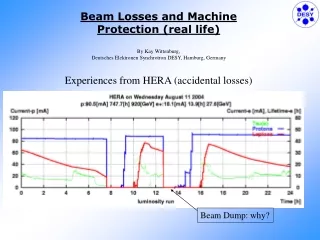
Collimators and Beam Absorbers for Cleaning and Machine Protection Ralph Assmann Workshop Chamonix XIV 17-21.01.2005 Acknowledgements to the members of the Collimation Project, the Collimation WG and the Machine Protection WG!
Collimators and Protection Devices CLEANING(continuous) • Collimators: 20 + 15 per beam (TCP,TCSG + TCSM) • Interact with primary, secondary or tertiary beam halo. • Scattering devices for spoiling and inducing inelastic interactions for protons lost from the beam! • Precise devices with two jaws, used for efficient beam cleaning. Small gaps and stringent tolerances. • Absorb little energy. Very robust. • Movable absorbers: 20 per beam (TCT, TCLA, TCLP) • Interact with shower products from p-p and p-collimator interactions. • Devices for absorbing the lost energy. • High-Z jaws. Larger gaps and more relaxed tolerances. • Diluters: 4 + 7 per beam (TDI, TCLI, TCDQ + TCDI) • Interact with mis-kicked beam or irregular beam tails (injection and dump protection). • Strong dilution (emittance blow-up) and partial absorption of energy • Scrapers: 3 per beam (TCHS) • Thin one-sided objects. Used for beam shaping and diagnostics. PROTECTION(accidents) SPECIAL(exceptional)
Detailed Table In total 138 collimator locations in LHC and transfer lines! Installed active length of ~ 145 m plus ~70 m overhead (215 m total) Injection: up to 39 collimators per beam Top energy: up to 41 collimators per beam
Sophisticated Cleaning Design in IR3 and IR7 Cleaning optics in collaboration with TRIUMF! Not more than 1 out of 10000 impacting protons may escape the cleaning system at 7 TeV: Cleaning S. Redaelli V. Vlachoudis et al Line input file for FLUKA generated from collimation halo tracking program. Automatic generation of FLUKA geometry with dynamic placement of collimators. Powerful tool Automatic generation of full LHC FLUKA geometry on the horizon?
Beam 3 s envelope Phase Space Coverage Injection Decent coverage of phase space: Beam will likely first be intercepted at a collimator or absorber or diluter (also for asymptotic orbit change)! BLM’s at collimator protect against beam loss! Not very comfortable margin though (profit from tighter settings)! Cold aperture
Limitation in intensity/luminosity! Beam-induced damage to the machine (collimators): Robust collimators! Instabilities: Impedance from collimators! Quenches or beam loss related aborts: Efficient cleaning! Experimental background: Efficient cleaning! Limitation in operational efficiency! Limitations from Collimation & Protection in Commissioning Towards Nominal Performance
Efficiency is Already Optimized in Design Phase- Robust collimators - Robustness maximized with C-C jaws and powerful water cooling!
Design Verification with Beam Test • Two prototype collimators installed. • SPS ring: • Functional test • Beam-based alignment with small gaps • Measurement of impedance, HOM, vacuum, e-cloud, ... • TT40: • Robustness test with 2.4 MJ/mm2 All VERY successful! S. Redaelli
Robustness Test Microphone C-C jaw TED Dump C jaw 450 GeV 3 1013 p 2 MJ 0.7 x 1.2 mm2 • Jaw impact could be measured during all expected hits: no change in jaw dimensions (nothing fell off) • Closure of two jaws to 1mm gap after test (no large debris). • Take out collimator in January and inspect. • Analyzing measurements of temperature, vibration and sound. ~ Tevatron beam ~ ½ kg TNT
Damage Limits in Present design • Danger to regular machine equipmentandmetallic absorbers: • Above 1e12 p at injection: 4e-3 of beam • Above 5e9 p at 7 TeV: 2e-5 of beam • Danger to C-C collimators/absorbers: • Above 3e13 p at injection: 10% of beam • Above 8e11 p at 7 TeV: 3e-3 of beam • Maximum allowed loss rates at collimators (goal): • 100 kW continuously. • 500 kW for 10 s (1% of beam lost in 10s). • 1 MW for 1 s. • Commissioning must respect these limits: we cannot relax more!
Impedance Limit for Movable Devices • Collimators and absorbers are close to beam: A resistive wall impedance is induced (gap size depends on b*)! • C-C material has reduced electrical conductivity (price to pay for a robust system). Fix with phase 2 advanced collimators. • Increase from collimators (nominal settings) for the imaginary part of the effective vertical impedance: • 8 kHz: factor 3 for injectionfactor 69 for 7 TeV • 20 kHz: factor 3 for injectionfactor 145 for 7 TeV • Large increase in impedance must be actively counteracted by transverse feedback and octupoles!
Collimator-Induced Tune Change (Changing Collimator Gap) Gap: 2.1 51 mm M. Gasior, R. Jones et al So-called BBQ device (M. Gasior & R. Jones) SPS tune depends on collimator gap! F. Zimmermann et al
Stability diagram (maximum octupoles) and collective tune shift for the most unstable coupled-bunch mode and head-tail mode 0 (1.15e11 p/b at 7 TeV) 25 ns Vertical plane Effect of the bunch spacing… 50 STABLE 75 Single bunch 150 300 900 Even single bunch unstable for nominal b*!
Setting Strategy for Collimation and Protection Elements at Injection Plateau • Clear requirements for settings:LHC ring aperture sets scale aring tight LHC apertureProtection devices must protect ring aperture aprot < aring protect against injected beam; take into account accuraciesSecondary collimators tighter than protection asec < aprot avoid too much secondary halo hitting protection devicesPrimary collimators tighter than secondary aprim < asec primary collimators define the aperture bottleneck in the LHC for cleaning of circulating beam! • These conditions should always be fulfilled: Avoid using protection devices as a single-stage cleaning system!
Settings during injection (in sb ,d=0) aabs = ~ 10.0 s Active absorbers in IR3 and IR7 asec3 = 9.3 s Secondary collimators IR3 (H) aprim3 = 8.0 s Primary collimators IR3 (H) aring = 7.5 s Ring cold aperture aprot = 6.8 s TDI, TCLI (V)protection elements aprot≥7.0 sTCDQ (H) protection element asec = 6.7 s Secondary collimators IR7 aprim = 5.7 s Primary collimators IR7 aTL = 4.5 s Transfer line collimators (ring protection at 6.9 s) Tight settings below “canonical” 6/7 s collimation settings! Tighter for larger beta beat (smaller cold aperture)!
Settings at 7 TeV (in sb ,d=0, nominal b*) aabs = ~ 20.0 s Active absorbers in IR3 asec3 = 18.0 s Secondary collimators IR3 (H) aprim3 = 15.0 s Primary collimators IR3 (H) aabs = ~ 10.0 s Active absorbers in and IR7 aring = 8.4 s Triplet cold aperture aprot = 8.3 s TCT protection and cleaning at triplet aprot≥7.5 sTCDQ (H) protection element asec = 7.0 s Secondary collimators IR7 aprim = 6.0 s Primary collimators IR7 “Canonical” 6/7 s collimation settings are achievable!
Collimator Set-up and Extrapolation to High Intensity • Several procedures are used: Collimator touching beam and observation with BLM’s, scraping of intensity, transmission measurement, … See also talks by S. Redaelli and V. Kain! • All these methods set up the collimators in a single stage process! • Intensities must be limited because of reduced cleaning efficiency with single stage cleaning process. • Reference collimator and beam positions will be recorded at low intensity and must be re-established at high intensity! • Cleaning set-up relies on excellent stability and reproducibility of machine, even while current is changed significantly! • Limited empirical optimization at top energy is possible! • Can we conceive a high current set-up for collimation? (also request from external review)
Commissioning of Cleaning System Two-stage cleaning (phase 2) Two-stage cleaning (phase 1) 43 Single-stage cleaning No collimation Pilot
Commissioning a Single-Stage Cleaning/Protection System with Circulating Beam • Put 3 betatron primary collimators to coarse 6 s setting (single-stage cleaning always in cleaning insertions). Put 1 momentum primary collimators to 8.5 s. • Put 8 TCLA absorbers in cleaning insertions to coarse 9 s position (shadow SC arc aperture and capture shower debris). • Set up 1 TDI and 1 TCLI for injection protection (collimators can be out during set-up). • Set up 1 TCDQ for dump protection. • Accumulate and ramp. • Set up up to 8 TCT’s at top energy to protect triplets. This system involves 22 movable elements per beam with increased margin for set-up errors and transient beam changes (orbit, beta-beat): Injection: 3.0 mm margin instead of 1.0 mm margin7 TeV: 0.6 mm margin instead of 0.2 mm margin Fully functional 1 stage cleaning with injection and dump protection, as well as full protection of triplets! It’s surely worth it! Required time for set-up: ~1 day per beam based on SPS experience! Extend towards two-stage system by moving in secondary collimators! Reduce margin!
How to Overcome Beam Loss Limitations? • Increase available aperture for the beam (work on orbit and beta beat). • Improve stability of the machine (lower loss rates). • Improve cleaning efficiency (close collimators reduce tolerances, increase impedance, increase complexity). • Decrease intensity. Sorted in order of priority for collimation/machine protection! Solution 4 reduces the performance and is only the last resort! It is the easy way! For above ~ 5-10% of nominal intensity we need to work hard on all topics 1-3! Don’t cut too many corners in the early commissioning! For detailed scenarios: Need estimate on beta beat and orbit during different phases of commissioning!
The “boss” The machine protection enforcement The Human Side of Machine Protection • People can have deep insight and great ideas: We are the only chance to make the accelerator work! • People can have very bad ideas and do stupid actions: We are the greatest risk to the accelerator! We can destroy the accelerator in a second! • We can try to avoid unnecessary problems: ONE central application for all movable elements in LHC and TL’s! • Close integration into online knowledge of orbit, optics, … Interlocking. • Clear and formal definition of responsibility for functions, optimization, operation, … • Redundant checking of machine status, e.g. positions of collimators/absorbers/diluters! (“Trust is good but control is better”)
Using Sensors to Monitor Jaw Positions Side view at one end Vacuum tank Microphonic sensor Temperature sensor Reference Reference Motor Motor Gap opening (LVDT) Resolver Resolver Gap position (LVDT)
Baseline Control Architecture Central Control Application Function of motor setting, warning levels, dump levels versus time. Motor parameters (speed, …). Beam-loss driven functions. Measurements. Post mortem. Warnings. From MP channel: Intensity, energy, b* BLM’s BPM readings Collimator Supervisory System Function motor. Motor parameters. Timing Functions (motor, warning, dump level). Info and post mortem. Motor Drive Control Warning & error levels. Info and post mortem. Motor and switches. STOP Abort Position Readout and Survey All position sensors. Environmental Survey System Preliminary by R. Assmann, M. Jonker, M. Lamont Abort Temperature sensors (jaw, cooling water, …) Vibration measurements & water flow ratesVacuum pressure & radiation measurementsMotor status & switches Detailed design by R. Losito et al
Motivation for this Controls Approach • Experience shows that advanced and automatic collimator control algorithms must be used (TEVATRON, RHIC): • BLM-based setting: “Move until BLM #i reads value X.” • Automatic movements for beam-based alignment requires functions. • Functions also allow fastest possible and most tolerant squeeze (move collimators during squeeze) useful once we are in routine operation? • Full integration into machine control and machine protection required, while preserving maximum flexibility for optimization of cleaning. • Break complicated system into manageable packages: • Central Control Application to generate simple or complicated functions and to provide dump and warning levels. • Collimator Drive Control: Simple system which provides minimum required control (motor movement). Without MP functionality. Can be specified quickly and bought from external company. MUST be ready in early 2007. • Position Readout & Survey and Environmental Survey System: Independent checks with various sensors. Provides position verification and protection functionality. Developed at CERN and expected to mature with beam experience. • Collimator Supervisory System: System for many collimators (1-2 per IR) with interface to other systems (e.g. BLM’s). Provides advanced features. Expected to develop with needs of LHC operation.
Summary: Preparing Commissioning of Absorbers, Collimators and Diluters • Collimation (phase 1) and protection design with movable devices essentially finalized! Coherent settings have been worked out. • Detailed commissioning models require scenarios for evolution of beta beat and orbit during the commissioning (we need to know what we have to protect)! • Now define control algorithms up to middle of 2005 for most movable collimators, absorbers and diluters in the LHC and the transfer lines! Additional manpower after “warning message” in Chamonix 2004 will arrive and will be essential for our success! • Goal: Simple low level scheme with advanced medium and top level! • Functions can be used! • Proposals: • Separate set of BLM’s for collimator tuning! Don’t mix machine protection and cleaning problems! • Further tests with SPS beam in 2006 (final motors, sensors, control, …) are proposed. • Include proposed one-stage cleaning and protection into early commissioning plan! • Include MD time for phase 1 limitations and phase 2 tests into 2008 schedule! Decision 2008! • Only ONE central control for collimators/absorbers/diluters! No special commissioning tools! • Very limited tools for control of experimental background: Input required from experiments!