Download
1 / 10
190 likes | 707 Views
Position, Velocity and Acceleration Analysis. Complex Algebra Method Dr. A- Alabduljabbar 3-4-2006. r p'. P'. D r p. y. P. x. r p. O. Introduction. Displacement:

E N D
Position, Velocity and Acceleration Analysis Complex Algebra Method Dr. A-Alabduljabbar 3-4-2006
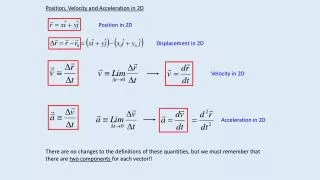
rp' P' Drp y P x rp O Introduction Displacement: • Consider the displacement of a point from position P (represented by rp) to P' (represented by rp'), in the x-y coordinate system. The change in the position of the point, r, is found by: r =rp’- rp (1) • Equation (1) is a vector equation which can be resolved into the two coordinates, and solved for the unknown displacement (magnitude and direction) provided that both magnitudes and directions of rp and rp' are defined.
rp' P' Drp y P x rp O Velocity • Consider the motion of a point from position P to P' during a time period of t as shown in the figure. The change is position is give by r. • The velocity is defined as the change in position with respect to time, and we can define the average velocity • When the time change becomes very small, the limit is taken to get the real (instant) velocity:
vp' P' Dvp y x P vp O Acceleration • Similarly, the acceleration is defined as the change in velocity with respect to time, and we can define the average acceleration • When the time period becomes very small, the limit is taken to get the instant acceleration :
Methods for Solution Solution for the unknown quantities in a certain mechanism can be obtained by different methods: • Analytical Methods: • Trigonometry Analysis • Considering the geometry: magnitudes and Angles of each vector • Vector Algebra • Standard vector analysis: addition and subtraction of vectors • Complex Algebra • Representation of vectors as complex numbers consisting of magnitudes and angles. • Graphical methods: Using graphical tools.
Complex Algebra Method • The vector is represented as a complex number which includes the magnitude and direction of the vector. r = r ejq • = r cosq +j r sinq • Where r: magnitude of r; q: Direction of r (from +ve x-axis); j: (-1)1/2; and e: Base of the natural logarithm. • To get velocity, differentiate the position vector. • To get acceleration, differentiate the velocity vector. jr sinq r q r cosq
Velocity Where: w: is the angular velocity • Acceleration Where: a: is the angular acceleration
An off-set crank slider mechanism 2 3 • Find the displacement of the slider (link 4) in terms of the dimensions of the other links and their positions. 4
Solution using Complex Algebra Method Algebraic methods have similar procedure for solution, as follows: • Procedure for Solution: • Form one closed vector loop for the mechanism. • Write vector equation representing the loop: Loop-Closure Equation. • Represent each vector with corresponding magnitudes and angles on the graph. • Determine known and unknown quantities, and also constant and variable quantities. • Solve the equation. • For velocity, differentiate the LCE once • For acceleration, differentiate the LCE twice
An off-set crank slider mechanism Given links 2 and 3 dimensions, the input angle q2, angular speed w2 , and acceleration a2 ; determine the slider position, velocity and acceleration. Solution • Draw the vector closure loop • Write the LCE • Represent each vector • Determine known and unknown variables • Solve LCE for displacement of slider • For velocity and acceleration, differentiate LCE as needed. 2 w2 a2 3 e 4 r2 q2 r3 r1 r4