Download
1 / 24
240 likes | 269 Views
Explore the characteristics of acoustic wave propagation in buried water pipes, focusing on predictions and validations through experimental techniques and mode shapes analysis.

E N D
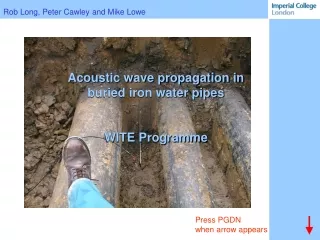
Rob Long, Peter Cawley and Mike Lowe Acoustic wave propagation in buried iron water pipes WITE Programme Press PGDN when arrow appears
Work reported in this presentation 1. Predict wave propagation characteristics in water pipes 2. Validate predictions using tests on buried water mains in streets.
Presentation Content 1: Introduction Motivation for research 2: Predictions 2:1 Dispersion curves for guided waves in water pipes 2:2 Mode shapes of fundamental modes 2:3 Phase velocity dispersion of fundamental modes 2:4 Effect of pipe bore variation on velocity dispersion 2:5 Effect of soil properties on mode attenuation 2:6 Effect of joints and fittings on mode attenuation 3: Validations 3:1 Experimental technique 3:2 Mode phase velocity measurement 3:3 Mode attenuation measurement 3:4 Soil property measurement 3:5 Experimental results 4: Summary
And Repaired Leakage from water pipes is a major issue concerning all water companies Introduction Motivation for research Leaking pipes should be located However many leaks are not so obvious from the surface
The distance to the leak d from one monitoring point is then formulated by assuming that the leak noise propagates at a non dispersive (ie does not vary with frequency) velocity V Accelerometers are mounted typically on valve stems to record the signals t Acoustic noise that arises from the leak propagates through the system d = z - (V .t ) 2 V . t d d Z Data recorded results in two signals One method is to locate leaks by acoustic signal analysis These two signals are cross correlated so as to obtain a time delay t
For sound propagation in structures such as pipes reflection and refraction of waves at the boundaries sets up a series guided waves. In the case of leak noise the vibrations recorded by the accelerometers are dominated by a guided wave that predominantly propagates in the water contained within the pipe How reasonable is it to assume that leak noise propagates non dispersively ? If we are considering sound propagation in bulk materials that have no boundaries then it would be a reasonable assumption With guided waves we need to look at the dispersive characteristics
We use the Disperse software developed by the NDT Group Imperial College to obtain dispersion curve numerical solutions Lets solve dispersion curves for a water filled 250mm bore 10mm wall thickness cast iron pipe surrounded by a vacuum The solution shown plots the phase velocity of each mode as a function of frequency Predictions Dispersion curves for guided waves in water pipes Modes in red are axially symmetric modes while those in blue are non axially symmetric modes
water water water iron iron iron 0 - + 0 - + 0 - + While axial displacements predominantly occur in the pipe wall. The axial displacements occur predominantly in the water in the pipe We will first look at the characteristics of the so called L(0,1) fundamental longitudinal mode The radial displacements are insignificant in the water and iron layers While the radial displacements dominate in both the water and iron layer Let us now examine the mode shapes of three modes that exist at low frequencies Finally we will look at the a1 mode shapes Watch the animation of the mode displacements for F(1,1) at near zero frequency. Notice the motion of the mode behaves as if bending/flexural. Notice the axial displacements for F(1,1) are insignificant. Watch the animation of the mode displacements for a1 at near zero frequency. Notice the displacements are axially symmetric, predominantly occur in the water and the motion is purely extensional/longitudinal. Next we will look at the characteristics of the so called F(1,1) fundamental Flexural mode at near zero frequency. Watch the animation of the mode displacements for L(0,1) at near zero frequency. Notice the displacements are axially symmetric, predominantly occur in the pipe wall and the motion is purely extensional/longitudinal. For L(0,1) at near zero frequency the radial displacements are insignificant in both the water and iron layers. The Mode Shape window shows radial displacements and axial displacements in the water and iron layers for the given mode at the given frequency. Mode shapes of fundamental modes
a1 L(0,1) F(1,1) Let us now examine the dispersion characteristics of the three modes that exist at low frequencies The fastest mode shown is the so called L(0,1) mode. L for longitudinal- mode displacements at low frequencies predominantly longitudinal 0 for zero phase change over the circumference ie axially symmetric 1 for the first Longitudinal mode that appears Notice how the phase velocity of the L(0,1) mode varies with frequency (dispersion). For 10 inch pipe the L(0,1) mode is particularly dispersive about 4kHz to 6kHz. It is the low frequency asymptote of the a1 mode that corresponds to velocity that leak location techniques assume leak noise to propagate at. Finally the alpha 1 mode. For 10 inch pipe the phase velocity of the F(1,1) mode is dispersive particularly about 0kHz to 2kHz. For 10inch pipe the a1 mode is particularly dispersive about 2kHz to 4kHz Next the so called F(1,1) mode. F for flexural- since mode displacements at low frequencies are as if the pipe is being flexed 1 for one phase change over the circumference ie non axially symmetric 1 for the first Flexural mode that appears Phase velocity dispersion of fundamental modes 0kHz Vph 4048m/s 2kHz Vph 4031m/s 6kHz Vph 1950m/s 8kHz Vph 1650m/s 4kHz Vph 3900m/s 0kHz Vph 0m/s 2kHz Vph 1102m/s 6kHz Vph 724m/s 8kHz Vph 771m/s 0kHz Vph 1212m/s 2kHz Vph 1152m/s 4kHz Vph 829m/s 6kHz Vph 725m/s 8kHz Vph 829m/s 4kHz Vph 785m/s
4 3 Phase Velocity m/ms 2 1 0 0 2 4 6 8 10 Frequency kHz Followed by the curves for a 10 inch bore pipe Let us compare dispersion curves for different bore pipes. First the dispersion curves for a 6 inch bore pipe showing the L(0,1), F(1,1) and a1 modes Then those for a 24 inch bore pipe Followed finally by those for a 36 inch bore pipe Notice that the effect of an increase in bore size shifts the dispersion curves to the left for For a given ratio of pipe-wall thickness to pipe bore size we can plot one set of curves as a function of Frequency-radius product for all pipe sizes. Effect of pipe bore variation on velocity dispersion L(0,1) , a1 and F(1,1)
Attenuation (dB-mm/m) Attenuation (dB-mm/m) Attenuation (dB-mm/m) Frequency-radius (MHz-mm) Frequency-radius (MHz-mm) Frequency-radius (MHz-mm) Dispersion Curves shown Coloured curves for water filled pipe surrounded by water (w-p-w) Black dotted curves for water filled pipe surrounded by a vacuum (w-p-v) Of the three modes the a mode is less attenuated at low frequencies such that it would be expected to become the dominate mode in received signals for long propagation distances First we will plot attenuation due to leakage for a pipe surrounded by saturated soil where r=1000kg/m3, CL =1500m/s and CS varies from For w-p-w system L(0,1) Phase velocity dispersion is very similar to w-p-v at lower frequencies then follows higher order Longitudinal modes at higher frequencies For w-p-w system a phase velocity is very similar to w-p-v at lower frequencies F(1,1) phase velocity is slower than w-p-v due to the surrounding medium For saturated soil All modes couple to leaking shear waves in the soil. Only L(0,1) couples to leaking longitudinal waves in the soil. Attenuation due to leakage increases for all modes with increasing bulk shear velocity in the soil Effect of soil properties on mode attenuation Now we will consider the effects of surrounding the pipe with soil. Typical soils are either saturated such as a clay slurry or unsaturated such as unconsolidated sand or clay 25 to 100m/s 25 to 50m/s 25 to 75m/s 25m/s Up to now we have considered the wave propagation only for a pipe surrounded by a vacuum Both types of soil will be characterised by density and the bulk longitudinal CL and shear CS velocities in the soil Now we need to look at the effect of embedding the pipe in a surrounding medium If the phase velocity of a mode is above CL or CS in the soil then the mode will couple to leaking longitudinal or shear waves in the soil These leaking waves carry away energy into the soil leading to mode attenuation amode F(1,1) mode L(0,1) mode amode
Attenuation (dB-mm/m) Attenuation (dB-mm/m) Attenuation (dB-mm/m) Frequency-radius (MHz-mm) Frequency-radius (MHz-mm) Frequency-radius (MHz-mm) Next we will plot attenuation due to leakage for a pipe surrounded by unsaturated soil where r=1900kg/m3, CS =100m/s and CL varies from Again of the three modes the a mode is less attenuated at low frequencies such that it would be expected to become the dominate mode in received signals for long propagation distances 250 to 1000m/s 250 to 500m/s 250 to 750m/s 250m/s amode F(1,1) mode L(0,1) mode amode
1.2 a, metal-metal a, soft joint 1 0.8 L(0,1) metal-metal 0.6 Transmission Coefficient. L(0,1) soft joint 0.4 Branch 0.2 a 0 0 0.1 0.2 0.3 0.4 0.5 Frequency-radius (MHz mm) soil pipe water r Joint Joint Joint Joint As a mode encounters such fittings attenuation will occur due to scattering and will be a function of wavelength and hence frequency. The water borne a mode suffers little attenuation for either joint whereas attenuation of the pipe-wall borne L(0,1) mode is significant particularly for the soft joint First we look at mode propagation across a joint. We consider a solid metal to metal contact joint and a soft joint where the joint is filled with sealant or rust. In practice a water main will have fittings such as Next we look at a mode propagation passed a branch with ratios of branch bore a over pipe bore r of 0.125 to 1. A branch acts as a high pass filter particularly when the branching is large. Effect of joints and fittings on mode attenuation joints every few metres that connect individual lengths and tees where pipes of bore r branch off to another pipe of borea
Alnwick (Northumberland Water) Tap on pipe Monitor sound with 4 off accelerometers Monitor sound with 4 off accelerometers to excite LF modes Joint soil Imperial College pipe water Guildford (Thames Water) Greenwich (Thames Water) Excavation Path length Z Measurements were conducted for a pipe buried in soil Pipes of various bore sizes buried in different soils were chosen for the measurements Validations Experimental technique Experiments were performed on buried water pipes at various sites in the UK to measure mode phase velocity and attenuation for a pipe surrounded by air At 2 other locations 4 off accelerometers were mounted equi-spaced around the circumference to monitor propagating signals At a given site pits were dug to get access to the full circumference of the pipe in 3 locations At one location an automatic tapper device was mounted on the pipe surface to input low frequencies vibrations and for a pipe surrounded by aggregate
Location a(t) Location b(t) FFT B() FFT A*() Phase spectrum Unwrap () Received signal at location a and b are windowed The FFTs of each signal is computed The Phase spectrum is then computed The Phase spectrum is unwrapped The Phase velocity Vph is computed from which the group velocity Vgr can be obtained Mode phase velocity Measurement
At each site the material of the pipe was noted Soil property measurement As was the pipe circumference Pipe wall thickness was measured by the pulse-echo technique We use the pipe material and measured pipe dimensions to produce predictions which we will compare to experimental results We also need to evaluate the acoustic properties of the soil that surrounds the pipe
We need a technique to evaluate the acoustic properties of near surface unconsolidated material Testing something like dry sand would be somewhat challenging Whereas wet sand would be a bit more manageable
Bar Piezo electric element Backing soil Axial excitement Signal for bar in air L Signal for embedded bar The attenuation characteristics of the mode are then obtained by dividing the FFT of the signal for a bar in soil by that for a bar in air The bar is then embedded in the soil up to a length L We use a technique that infers the bulk velocity in the soil from the attenuation characteristics of a mode that propagates down a bar embedded in the soil We take a steel bar about 1m long with a piezo electric element bonded at one end This mechanical pulse propagates down the bar An electrical pulse is applied across the piezo electric element resulting in an axial excitement in the bar Into the embedded portion where it attenuates due to leakage The pulse again propagates down the bar Is reflected off the other end Is reflected, attenuates in the embedded portion again is received at the piezo electric element where an electrical signal is produced and saved And is received at the element Attenuation = [20 log (R soil/Rair)]/2L
Attenuation (dB/m) Frequency (MHz) The measured attenuation is then plotted A series of predicted dispersion curves are solved for soils with different values of CL and CS in the soil The predicted dispersion curve that best matches the measured attenuation infers the soil properties
Attenuation (dB/m) Frequency (MHz) Pipe details Path Length 15m Ductile Iron 6 inch bore 6.5mm wall thickness Measured soil Properties Density 1900kg/m3 Experimental Result A number of tests have been carried out on various water mains at sites in the UK. Presented are results from CL soil 900m/s CS soil 80m/s • Site location in Guildford UK • Tests conducted over 3 days in June 2002 Goals To verify predicted alpha mode phase velocity for a pipe surrounded by soil, air and aggregate To verify predicted alpha mode attenuation for a buried pipe
Phase Velocity (m/s) Frequency (kHz) Verification of a mode phase velocity Predicted dispersion curves for pipe surrounded by air and clay Experimental dispersion curves for pipe surrounded by air clay andaggregate Predicted dispersion verified
Attenuation (dB/m) Frequency (kHz) Verification of a mode attenuation due to leakage Predicted dispersion curves for pipe surrounded by air andaggregate Experimental dispersion curves for pipe surrounded by air andaggregate Predicted dispersion verified
Main project achievements covered in this presentation Summary Identified what modes propagate over short and long path lengths on different pipe diameters Introduced new technique for measuring bulk velocities in near surface soils Verified predicted dispersion curves




![SCIENCE OPS [contributions from Peter, Trey, Dom, Kristen, Kristina and Mike]](https://cdn2.slideserve.com/4197460/science-ops-contributions-from-peter-trey-dom-kristen-kristina-and-mike-dt.jpg)