
세계적인 경쟁력을 확보한 기술적 성과
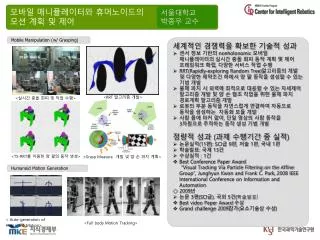
모바일 매니퓰레이터와 휴머노이드의 모션 계획 및 제어. 서울대학교 박종우 교수. Mobile Manipulation (w/ Grasping). 세계적인 경쟁력을 확보한 기술적 성과 센서 정보 기반의 nonholonomic 모바일 매니퓰레이터의 실시간 충돌 회피 동작 계획 및 제어 프레임워크 확립 , 다양한 서비스 작업 수행 RRT(Rapidly-exploring Random Tree) 알고리즘의 개발 및 다양한 제약조건 하에서 양 팔 동작을 생성할 수 있는 기법 개발

세계적인 경쟁력을 확보한 기술적 성과
E N D
Presentation Transcript
모바일 매니퓰레이터와 휴머노이드의모션 계획 및 제어 서울대학교 박종우 교수 Mobile Manipulation (w/ Grasping) • 세계적인 경쟁력을 확보한 기술적 성과 • 센서 정보 기반의 nonholonomic 모바일 매니퓰레이터의 실시간충돌 회피 동작 계획 및 제어 프레임워크 확립, 다양한 서비스 작업 수행 • RRT(Rapidly-exploring Random Tree)알고리즘의 개발 및 다양한 제약조건 하에서 양 팔 동작을 생성할 수 있는 기법 개발 • 물체 파지 시 외력에 최적으로 대응할 수 있는 자세제어 알고리즘 개발 및 양 손 협조 작업을 위한 물체 파지 경로계획 알고리즘 개발 • 로봇의 부분 동작을 자연스럽게 연결하여 자동으로 동작을 생성하는 자동화 모듈 개발 • 사람 몸에 마커 없이, 단일 영상의 사람 동작을 3차원으로 추적하는 동작 생성 기법 개발 • 정량적 성과 (과제 수행기간 중 실적) • 논문실적(11편): SCI급 9편, 저술 1편, 국내 1편 • 학술발표: 국제 13건 • 수상실적 : 1건 • Best Conference Paper Award “Visual Tracking Via Particle Filtering on the Affine Group”, Junghyun Kwon and Frank C. Park, 2008 IEEE International Conference on Information and Automation ◇ 2009년 • 논문 3편(SCI급), 국외 5건(학술발표) • Best video Paper Award 수상 • Grand challenge 2009참가(요소기술상 수상) <실시간 충돌 회피 및 작업 수행> <RRT 알고리즘 개발> <Grasp Measure 개발 및 양 손 파지 계획> Humanoid Motion Generation <Full body Motion Tracking> < Auto-generation of Humanoid Motion> <TS-RRT를 이용한 양 팔의 동작 생성>