Download
1 / 18
180 likes | 382 Views
z. y. (x, y, z). x. נשתמש בחומר של הפרקים האחרונים ( תנועה בממד אחד ווקטורים) לדון בתנועה רב ממדית. מיקום וההעתק. כדי למקם חלקיק משתמשים בוקטור המקום המתחיל בנקודת יחוס מסוימת. אם החלקיק נמצא בנקודה (x, y, z) אז וקטור המקום יהיה. r = x i +y j + z k.

E N D
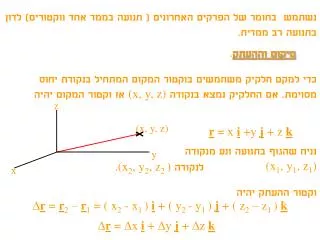
z y (x, y, z) x נשתמש בחומר של הפרקים האחרונים ( תנועה בממד אחד ווקטורים) לדון בתנועה רב ממדית. מיקום וההעתק. כדי למקם חלקיק משתמשים בוקטור המקום המתחיל בנקודת יחוס מסוימת. אם החלקיק נמצא בנקודה (x, y, z) אז וקטור המקום יהיה r = x i +y j + z k נניח שהגוף בתנועה ונע מנקודה (x1, y1, z1) לנקודה (x2, y2, z2 ). וקטור ההעתק יהיה r = r2 – r1 = ( x2 - x1 ) i + ( y2 - y1 ) j + ( z2 – z1 ) k r = x i + y j + z k
דוגמה שפן רץ לאורך מגרש חניה. מיקומו כל רגע ניתן ע"י x = -0.3 t2 + 7.2 t + 28 y = 0.22 t2 - 9.1 t + 30 1. מהו מיקומו אחרי 15 שניות x = 66 m y = -57 m r = 66i – 57j r = (662 + 572)½ = 87m = tan –1(-57/66) = -41° 2. מהו מסלולו של השפן
מהירות ממוצעת ורגעית משיק מהירות ממוצעת מוגדרת vavg = r / t מהגדרת וקטור ההעתקrמקבלים vavg = (x i + y j + z k )/ t y המהירות הרגעית מוגדרת כאשר מרווח הזמן בין שתי הנקודות שואף לאפס. זהו המקרה בו המיתר שואף למשיק. r r1 r2 מסלול x המהירות הרגעית משיקה למסלול. v = dr / dt v = (dx/dt) i + (dy/dt) j + (dz/dt) k = vxi +vyj + vzk
v y vy vx x מהי מהירות השפן שרץ במגרש החניה 15 שניות לאחר תחילת תנועתו. vx = dx / dt = d ( -0.3t2 + 7.2t + 28 ) /dt = -0.6t + 7.2 vy = dy / dt = d (0.22t2 – 9.1t + 30 ) /dt = 0.44t - 9.1 vx = -2.1 m/s vy = -2.5 m/s v = -2.1 i – 2.5 j v = ( vx 2 + vy 2 )½ = 3.3 m/s = tan -1 ( 2.5 /2.1) = -130°
תאוצה y ay a ax x כאמור, תאוצה היא קצב השתנות המהירות. כמו במקרים הקודמים, אם מהירות הגוף במיקום 1 הוא v1 ובמיקום 2 הוא v2 אזי aavg = (v2 – v1) / t וכרגיל, התאוצה הרגעית תהיה a = dv /dt a = d (vx i + vy j + vz k ) / dt a = dvx/dt i + dvy/dt j + dvz/dt k ax = dvx/dt ay = dvy/dt az = dvz/dt a = axi + ayj + azk מסלול
תנועה בליסטית זוהי תנועה דו – ממדית שבה חלקיק נע במישור אנכי במהירות התחלתית v ובתאוצה אנכית g. אפשר לפרק את התנועה המסובכת לשתי תנועות פשוטות בשני צירים מאונכים המתבצעות בעת ובעונה אחת.
דוגמה נוספת להפרדת התנועה לשתי תנועות פשוטות ניתנת במקרה הבא. G הוא רובה אויר. המטרה היא קופסה התלויה בעזרת מגנט M. הקנה של הרובה מכוון ישר לקופסה. ברגע הירייה המגנט משחרר את הקופסה. אם g = 0 מסלול הכדור יהיה קו ישר והוא יפגע בקופסה כיון שתישאר במקומה. במציאות הקופסה תיפול מרחק h במשך תנועת הכדור. הכדור גם הוא נופל מרחק h מהקו הישר. מסקנה: הכדור יפגע בקופסה!
ניתוח התנועה v0 = v0xi + v0yj vx = v0cos 0 vy= v0sin 0 תנאי ההתחלה תנועה אופקית vx = v0cos 0 x = x0 + (v0cos 0) t תנועה אנכית vy = v0sin 0 – gt y = y0 + (v0sin 0)t - ½ g t2 t = x / (v0cos 0) y = ( tan 0 )x – - g x2 / 2 (v0cos 0)2
כדי למצוא את טווח הגוף הנזרק בתנועה בליסטית, מציבים במשואת המסלול את הגובה y = 0. 0 = x tan 0 – g x2/ 2(v0cos 0 )2 0 = x [ tan 0 –g x/ 2(v0cos 0 )2] x = 0 הוא פתרון טריביאלי של נקודת הזריקה 0 = tan 0 –gx/ 2 (v0 cos 0 )2 x = R = tan 0 2 (v0 cos 0 )2 / g R = v0 2 sin 20 / g את הגובה המקסימלי ניתן למצוא כיון שהמהירות בשיא הגובה היא בעלת רכיב אופקי בלבד. vy2 = (v0sin 0)2 –2gymax = 0 ymax = (v0sin 0)2 / 2g
השפעת האוויר ניתוח הבעיה לא הביא בחשבון את השפעת האוויר. האוויר מתנגד לתנועה ועקב כך הטווח ושיא הגובה קטנים. השפעת האוויר (ע"י חשובים) ניתנת בטבלה הבאה ומבוססת על אותם תנאי התחלה.
נחזור למקרה הלוליין. הוא נורה מהתותח במהירות של 26.5 m/s ובזווית של °53. גובה גלגלי הענק הוא 18 m. 1. באיזה גובה יעבור מעל הגלגל הראשון? 2. באיזה גובה יהיה מעל הגלגל המרכזי אם שם שיא הגובה. y = tan 53 x23 – 9.8 x 23 2 / 2x (26.5 cos 53 )2 = 20.3 הוא עובר בגובה של 5.3m מעל הגלגל כיון שהוא נורה מגובה של 3m מעל האדמה. ymax = (26.5 sin 53)2 / (2 x 9.8) = 22.9 m הוא יהיה בגובה של 7.9m מעליו.
היכן הוא צריך לפרוס את רשת הביטחון כדי שתקלוט אותו? R = 26.5 2 sin 2(53)/ 9.8 = 69 הוא צריך לפרוס את הרשת במרחק 69m מנקודת הירייה. החישוב הנ"ל לא הביא בחשבון את התנגדות האוויר. במקרה כזה, הטווח ושיא הגובה יקטנו ועליו לפרוס רשת גדולה כדי להבטיח את בטחונו האישי.
a v v a a v בתנועה מעגלית אחידה הגוף נע על פני מעגל או קשת מעגלית בקצב קבוע. אין זאת אומרת כי מהירותו קבועה כיון שמהירות היא גודל וקטורי וכיוונה משתנה כל הזמן. שינוי המהירות נגרם ע"י תאוצה, ובתנועה מעגלית התאוצה מכוונת כלפי מרכז המעגל וקרויה תאוצה צנטריפטלית שפירושה מחפשת את המרכז. התאוצה תמיד מאונכת לכוון המהירות. תנועה מעגלית אחידה a = v2/r גודל התאוצה זמן המחזור T = 2r / v זהו הזמן הדרוש לגוף להשלים סבוב אחד. התדירות היא מספר הסיבובים לשניה f = 1 / T = v / 2r
y p x yp r xp v= vx i + vy j = -v sin i + v cos j v v = -vyp/r i + vxp/r j a = dv /dt = (-v /r) ( dyp /dt ) i + ( v /r) (dxp /dt ) j dyp /dt = vy dxp /dt = vx a = (-v2/r cos ) i + (v2/r sin ) j a = ( ax2 +ay2 )½ = v2/r ( cos2 + sin2 )½ = v2/r
טייסי קרב מכירים את השפעת התאוצה הצנטריפטלית בזמן סבוב מהיר כאשר הראש בכיוון מרכז הסיבוב. לחץ הדם במוח יורד עד כדי חוסר תפקוד. קיימים סימני אזהרה. כאשר התאוצה היא 2g או 3g הטייס מרגיש כבדות. ב - 4g הטייס רואה בשחור – לבן ושדה הראיה קטן. אם התאוצה נמשכת או גדלה, הטייס מאבד את הכרתו. זהו מצב הנקרא g - LOC ( g – induced Loss Of Consciousness ). מהי התאוצה של טייס F-22 הטס במהירות של 2500 km / h ורדיוס סיבוב של 5.8 km? a = v2 / r = 694 2 / 5800 = 83 m / s2 = 8.5g בקרב אוויר הטייס יאבד מיד את הכרתו.
מהירות יחסית חד-ממדית נניח שאתה רואה מכונית הנוסעת במהירות של 100 קמ"ש. למכונית שניה, הנוסעת באותה מהירות ובאותו כיוון, המכונית הראשונה נראית במנוחה. מסקנה: מהירות של גוף תלויה במערכת הייחוס של הצופה המודד את המהירות. מערכת הייחוס היא עצם פיסיקלי שמצרפים אליו מערכת קואורדינטות. לדוגמה המהירות הרשומה בדוח מהירות היא יחסית לאדמה. היא הייתה אחרת אם השוטר הרושם את הדוח היה בתנועה.
נניח שאמנון, בראשית הצירים של מערכת A, חונה לצד הכביש ורואה מכונית חולפת ( P ). ברוך, בראשית הצירים של מערכת B, נוסע במהירות קבועה על הכביש וצופה במכונית. שניהם מודדים את מיקום המכונית. A B P xPB xPA vBA xBA xPA = xPB + xBA dxPA / dt = dxPB / dt + dxBA / dt vPA = vPB + vBA חוק חיבור המהירויות: מהירות P יחסית ל –A שווה למהירות של P יחסית ל – B פלוס מהירות של B יחסית ל – A. ואם מכונית P מאיצה dvPA /dt = dvPB /dt +dvBA /dt aPA = aPB
תנועה יחסית בשני ממדים vBA rPB P rBA rPA בתנועה יחסית ביותר ממימד אחד יש צורך להביא בחשבון את האופי הוקטורי של ההעתק והמהירות. rPA = rPB + rBA vPA = vPB + vBA aPA = aPB