
五、瞬时转动中心的求法:
五、瞬时转动中心的求法:. 1 、图示法:. 2 、分析法 :. ( 1 )空间极迹:. ( 2 )本体极迹:. 例:求杆子的空间极迹和本体极迹?. 解:. 1 、图示法 :. ①选定、动坐标系. ②用图示法找出瞬心的位置。. ③将瞬心位置用定、动坐标表达. 2 、分析法解 :. 作业: p.236 3.157 、 3.167 、 3.177. §. 3 、刚体绕固定点转动. 一、定义:. 二、角速度是矢量. 1 、有限大小的角位移不是矢量 。. 2 、无限小的角位移是矢量 。. 3 、角速度是矢量:. 三、欧拉角. A ( O,O,O ).

五、瞬时转动中心的求法:
E N D
Presentation Transcript
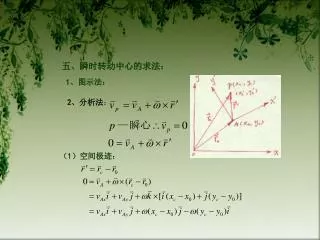
五、瞬时转动中心的求法: 1、图示法: 2、分析法: (1)空间极迹:
例:求杆子的空间极迹和本体极迹? 解: 1、图示法: ①选定、动坐标系 ②用图示法找出瞬心的位置。 ③将瞬心位置用定、动坐标表达
2、分析法解: 作业:p.236 3.157、3.167、3.177
§ 3、刚体绕固定点转动 一、定义: 二、角速度是矢量 1、有限大小的角位移不是矢量。 2、无限小的角位移是矢量。 3、角速度是矢量: 三、欧拉角 A (O,O,O) B (x1,y1,z1) C (x2,y2,z2) ON——节线 ——进动角 ——自转角 ——章动角 欧拉角
§ 4、作用在刚体上的力 一.力的可传性: 1、一个实验事实: 2、力的可传性:作用在刚体上的力,可沿其作用线移动 。力是滑移矢量 3、注意: (1)力的作用线的位置不能任意平移。 (2)讨论物体的形变时,力的可传性失 效。 (3)力的可传性只限于同一个刚体内
二、平面汇交力系的合力 三、平行力系的合力: 合力的作用点C的坐标为:
四、力偶 1、力偶不存在合力。 大小: 2、力偶矩: [力偶矩与计算力矩的参考点无关,可以任意改变 及 , 不变 。] (1)在同一平面内,具有相同力偶矩的力偶是等效的。 限于刚体内 (2)平行平面内,两个力偶矩相同的力偶等效。 (3)既然作用在刚体上的力偶是自由矢量。 3、合力偶矩 力偶系
五、一般力系的简化——一力和一力偶 主矢: 主矩:
§ 5、刚体运动微分方程与刚体静力学 一、刚体运动微分方程: 1、由质心运动定理 ——主矢 2、对质心的动量矩定理 ——主矩 3、对固定点的动量矩定理 ——对固定点o的主矩 4、辅助方程: 机械能守恒:T+V=E。
二、刚体静力学: 1、刚体的平衡方程 平衡条件: 对任意点o的主矩: 2、汇交力系的平衡方程
3、平面力系的平衡方程 注意: 1、刚体的位置,刚体所受的力。 2、从力学理论上讲只能解决六个未知量。 3、掌握有分有合的方法。 4、简化中心o应选在未知力最多的地方 5、解题时还要注意几何关系。
例1、求A及B点对杆的作用力。 解: (1)取杆子为研究对象 (2)受力分析 (3)建立坐标系 (4)列方程 对B点取矩以逆时针方向为正 大小: 方向:
例2、两根杆子OA和AB长度均为l,重量均为Q。两杆光滑铰接于A,杆OA的另一端又铰接于固定点O,杆AB的B端则搁在地板上。当OA与悬直线成 角,AB与水平线成 角时,此系统正好要开始向左滑动,如图所示,试求地板对杆AB的静摩擦系数。 解法一:将系统分成OA和AB两部分来考虑。 对AB: 对OA杆: 对A点: 对O点取矩:
解法二、光考虑AB和OA整体的平衡,然后考虑AB或OA的平衡解法二、光考虑AB和OA整体的平衡,然后考虑AB或OA的平衡 对O点取短: 作业:p.3.27,3.47,3.57
§ 6、刚体的平动与绕固定轴的转动——动力学 一、平动:质点动学规律都适用 二、定轴转动的动力学问题 1、动能定理: 2、定轴转动的动力学方程 [作为定轴转动的例子.p.188,例1.]
§ 7、刚体的平面平体运动 一、基本动力学方程: 平动约束 约束关系 转动约束 二、动能定理、机械能守恒律: d(T+V)=0
例1、有一条不可伸长的轻绳一端固结在天花板上,另一端缠着一个半径为r,重为p的滑轮。求滑轮中心即圆心下降的加速度。例1、有一条不可伸长的轻绳一端固结在天花板上,另一端缠着一个半径为r,重为p的滑轮。求滑轮中心即圆心下降的加速度。 解法一: 取坐标原点0为零势点。 解法二:
条件: 方向指向圆心
例2、p.238-3.227 求t=? 解 :(1)∵球和板之间有相对运动∴不能将球和板当作单刚体处理。应该分别取球和板为研究对象。由题意可知,板是作平动的,而球是作平面平行运动。 对这个问题我们得先分别列出它们的动力学方程,然后根据题意找出两者之间所存在的约束关系,那么根据所求的问题就可以得出最终的结果。 (2)受力分析、运动分析 (3)建立坐标系∵两物体在垂直方向上都没有运动∴只需沿水平方向取一维坐标。 (4)列出研究对象的动力学方程。 对m: 对M:
∵ 、 和 均为常数,设球从静止到作纯滚动经历的时间为t,因此球在初始时刻t=0时 (找出约束关系,才能解出所求的结果) (5)找约束关系: 根据平面平行运动刚体上一点的速度公式来找出运动约束关系。取c为基点,则球与板的接触点o的速度为: ∵作纯滚动时: 作业:p.23 3.207 3.237 3.287
第六章 分析力学 § 引言 § § § § 1、约束与广义坐标 4、完整约束的第二类拉 格朗日方程 2、虚功原理 3、达朗伯—拉勃朗日方程
§ 1、约束与广义坐标 一、约束: 1、定义:凡是强加在体系上而限制其运动(几何位置,速度)的条件 约束方程: 2、约束的分类: (1)完整与不完整约束: (2)稳定约束与不稳定约束:
(3)可解约束与不可解约束: 质点可离开约束面的约束--叫做可解约束。 解: 二、广义坐标: 1、定义:凡是以描写质点组位置所需最少的一组参量,就叫做广义坐标。α=1,2,……s 2、广义坐标:(直角坐标)长度,角度。 3、广义速度: 广义速度。
三、自由度: n——3n k——完整约束 s=3n-k i=1,2,3···n
§ 2、虚功原理 达朗伯—拉格朗日方程→第二类拉格朗日方程→哈密顿正则方程→哈密顿原理→正则交换→哈密顿一雅可俾方程 。 虚功原理 达朗伯原理 一、虚位移:符合约束条件的假想的位移—— (1)假想的 (2)与t无关 (3)虚位移可以有好多个 实位移:是经过dt后质点的真正位移——只能有一个 二、虚功原理: 1、虚功: 2、理想约束 : 3、定理:质点组在理想约束的情况下,其平衡条件(必要)是主动力所作的虚功之和为零。
证明: 适用:质点组,理想约束 三、应用虚功原理解题: 例1、求F=? 解: ②找主动力 ①选系统:杆子 ③列出虚功方程: ④虚功方程列出之后,要把方程中的虚位移化成独立的变量。 ×
例2、已知p、l求轻杆所受的力 解: p.276.例1.可让学生在课堂上自学。
§ 3、达朗伯—拉勃朗日方程 一、达朗伯原理 达朗伯原理的坐标系是选在与质点无相对运动上的。 推论: ① ② 二、朗伯——拉格朗日方程: 理想约束:
§ 4.完整约束的第二类拉格朗日方程 二、两个数学关系。 ① ②
三、讨论: 1、这是s个方程,可解s个广义坐标q=q(t)。 2、这是s个对t的二阶常微分方程。 3、条件:完整约束,动能T是相对于惯性系的动能;对质点和质点组都是适用的;对非惯性系也适用,q可用动坐标。 4、解题的方法是一致的,只要写出 5、广义力是什么? 求广义力的方法: ① 按定义: ②
例2、 , ,试求出其拉格朗日方程。 解: (1)选取广义坐标: (2)求动能:
方法二:求 设有一: 求 设 (4)列拉氏方程:
例3.p.265 4.107求小圆环m在大圆圈切向的运动微分方程。
例4.已知杆与平衡锤对o的 ,对o1的 ,求杆的角加速度。 解:取 杆+平衡锤+A轮 = 寻找约束关系:方法一: 方法二:由瞬心法或纯滚动的条件可得: 又 故有:
例5.[课堂练习]让学员由拉化方程推出刚体作平面平行运动的基本动力学方程。例5.[课堂练习]让学员由拉化方程推出刚体作平面平行运动的基本动力学方程。
10、上式换成单摆 ,结果又会怎样? (上课举过的保持系拉氏方程的两个例子,作业的三个题,尤其是作业的补充题)
四、完整约束保守系的拉格朗日方程: 适用条件:完整约束,保守力系或内外力均不作虚功L对惯性系的量,
例1:求两质点的相对运动规律。 解: (1)取 (2) (3) (4)列出拉氏方程
(5)解方程得出结果 令 则 令
例2.设有一与弹簧相连的滑块A,其质量为m,它可沿光滑水平面无摩擦来回滑动。弹簧的弹性系数为k。在滑块A上又连一单摆,如图所示。摆的质量为m2,摆长为l(杆子的质量不计)试用拉氏方程列出该系统的运动微分方程。例2.设有一与弹簧相连的滑块A,其质量为m,它可沿光滑水平面无摩擦来回滑动。弹簧的弹性系数为k。在滑块A上又连一单摆,如图所示。摆的质量为m2,摆长为l(杆子的质量不计)试用拉氏方程列出该系统的运动微分方程。 解:(1)取m1+m2+弹簧 为研究系统,此系统除了保守力之外,其它力均不作虚功∴可以用保守系拉氏方程求解。 (2)选广义坐标: 取弹簧原长时A所在的位置为坐标原点。 (3)求T,V,L 方法一: 方法二:
(4)列出拉氏方程 (5)解方程得出结果: 作业:p.364 5.97, 5.167.5.117