Download
1 / 15
170 likes | 325 Views
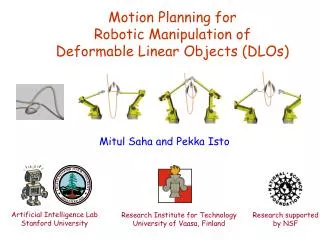
Motion Planning for Robotic Manipulation of Deformable Linear Objects (DLOs). Mitul Saha, Pekka Isto, and Jean-Claude Latombe. Research supported by NSF, ABB and GM. Artificial Intelligence Lab Stanford University. Objective and Motivation.

E N D
Motion Planning for Robotic Manipulation of Deformable Linear Objects (DLOs) Mitul Saha, Pekka Isto, and Jean-Claude Latombe Research supported by NSF, ABB and GM Artificial Intelligence Lab Stanford University
Objective and Motivation • Develop a motion planner to aid robot arms perform complex tasks with Deformable Linear Objects (DLOs) like tieing self-knots and knots around objects. • Examples of DLO are ropes, strings, surgical sutures, cables etc. Bowline knot Sailing knot Figure-8 knot Surgeon’s knot Manual knot tying Robotic knot tying
Objective and Motivation • Push the state of the art in robotic manipulation • Manipulating DLOs is perhaps one of the most challenging tasks in robotics • Possible Impact/Applications • Could open many new domains for robotics application • Enhance manipulation skills of Humanoids assisting humans in their common life activities • Automated surgery
The Manipulation Problem • Defining goal configurations • Topological goal vs geometric goal - This leads to the development of a topological path planner Geometrically different but topologically same: Bowline knot
The Manipulation Problem • Defining goal configurations - Topological goal (aka “Crossing Configuration”) is defined with respect to a reference plane Planar projection of the DLO central axis DLO Crossings Crossing Configuration: (C1, C2, C3, C4): ((1,-6)-, (-2,5)-, (3,-8)-, (-4,7)-)
- Reduced alternating Alternating with embedded slip loops The Manipulation Problem • We focus on two types of common knots: under over over Crossing Configuration: ((1,-6)-, (-2,5)-, (3,-8)-, (-4,7)-)
The problem: • Start from unwound (State-0) DLO configuration and achieve a configuration and achieve a configuration with desired topology • Given: • Physics of the DLO as a state function f • Manipulator arms A final configuration with desired topology Starting configuration DLO
Our Planning Approach - Manipulation using 2 cooperating robot arms - Use of static sliding supports (“tri-fingers”) to provide structural support
Defining “Forming Sequence” • Knots can be tied, state-by-state, in the order defined by their “forming sequence” Forming Sequence: C2, C1, C4, C3 A substate
Defining “hierarchy of components” The curves in red are “curve-pieces”: c12, c23, c34, c45, c56, c67, c78. The component Co is bounded by {c12, c56}. I II I II I II I-a III III I-b
“Hierarchy of components” is used to determine where to place static sliding supports (“tri-fingers”)
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) -Knot is tied state by state using the “forming sequence” Forming Sequence: C2, C1, C4, C3
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) DLO Need to find collision free robot motion that produces u, the small random move of the grasped point Sample a new DLO configuration by randomly perturbing the grasped point of an existing configuration Robot A Robot A dQ = J+u + (I - J+J) dq u: motion of grasp J : Jacobian J+: right psuedo-inverse ofJ dq: small random robot motion dQ: robot motion producingu Grasping robot fails DLO Robot B Robot B
Our “topological” motion planner is based on Probabilistic RoadMaps (PRMs) • Use the “hierarchy of components” to determine when to place • static sliding supports (“tri-fingers”)