Download
1 / 18
180 likes | 290 Views
RIO: Relational Indexing for Object Recognition. RIO worked with industrial parts that could have - planar surfaces - cylindrical surfaces - threads. Review of Alignment. Alignment is the most common paradigm for matching 3D models to either 2D or 3D data. The steps are:.

E N D
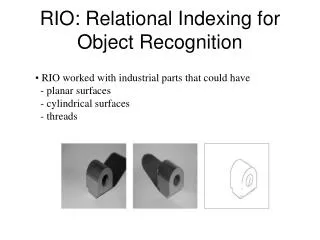
RIO: Relational Indexing for Object Recognition • RIO worked with industrial parts that could have • - planar surfaces • - cylindrical surfaces • - threads
Review of Alignment Alignment is the most common paradigm for matching 3D models to either 2D or 3D data. The steps are: 1. hypothesize a correspondence between a set of model points and a set of data points 2. From the correspondence compute a transformation from model to data 3. Apply the transformation to the model features to produce transformed features 4. Compare the transformed model features to the image features to verify or disprove the hypothesis
2D-3D Alignment • single 2D images of the objects • 3D object models • - full 3D models, such as GC or SEV • - view class models representing characteristic • views of the objects
View Classes and Viewing Sphere • The space of view points can be • partitioned into a finite set of • characteristic views. • Each view class represents a set of • view points that have something • in common, such as: • 1. same surfaces are visible • 2. same line segments are visible • 3. relational distance between pairs of them is small V v
3 View Classes of a Cube 1 surface 2 surfaces 3 surfaces
Object Representation in RIO • 3D objects are represented by a 3D mesh and set of 2D view classes. • Each view class is represented by an attributed graph whose • nodes are features and whose attributed edges are relationships. • For purposes of indexing, attributed graphs are stored as • sets of 2-graphs, graphs with 2 nodes and 2 relationships. share an arc coaxial arc cluster ellipse
RIO Features ellipses coaxials coaxials-multi parallel lines junctions triples close and far L V Y Z U
RIO Relationships • share one arc • share one line • share two lines • coaxial • close at extremal points • bounding box encloses / enclosed by
Hexnut Object What other features and relationships can you find?
Graph and 2-Graph Representations 1 coaxials- multi encloses 1 1 2 3 2 3 3 2 encloses 2 ellipse e e e c encloses 3 parallel lines coaxial
Relational Indexing for Recognition Preprocessing (off-line) Phase • for each model view Mi in the database • encode each 2-graph of Mi to produce an index • store Mi and associated information in the indexed • bin of a hash table H
Matching (on-line) phase • Construct a relational (2-graph) description D for the scene • For each 2-graph G of D • Select the Mis with high votes as possible hypotheses • Verify or disprove via alignment, using the 3D meshes • encode it, producing an index to access the hash table H • cast a vote for each Mi in the associated bin
Verification • The matched features of the hypothesized object are • used to determine its pose. Pose is computed from • correspondences between 2D and 3D points, lines, • and circles. • 2. The 3D mesh of the object is used to project all its • features onto the image using perspective projection • and hidden feature removal. • 3. A verification procedurechecks how well the object • features line up with edges on the image, using a • Hausdorf distance between expected and existing edges.
RIO Verifications incorrect hypothesis