Download
1 / 27
270 likes | 473 Views
Interface Design Vehicle Busses. Omid Fatemi. Outline. Busses. Computer buses Peripheral buses Instrumentation buses Vehicle buses. Vehicle Buses?. Why buses in vehicles? Number of electronic equipments is increasing heavily in vehicles (expensive wiring)

E N D
Interface DesignVehicle Busses Omid Fatemi
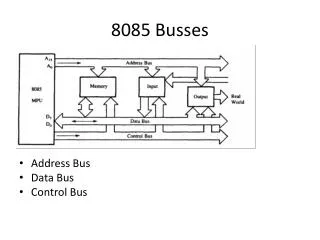
Busses • Computer buses • Peripheral buses • Instrumentation buses • Vehicle buses
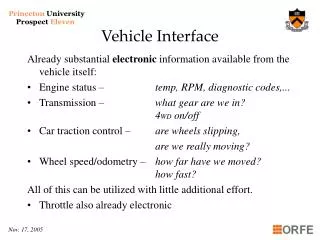
Vehicle Buses? • Why buses in vehicles? • Number of electronic equipments is increasing heavily in vehicles (expensive wiring) • Modern vehicles control system needs a lot of information from sensors • Easier fault diagnostic (tester can be connected to a single plug)
General Characteristics • Typically short buses (no hierarchy) • Open topology to provide easy addition of new modules and removing of old modules • Broadcast type of transmission is typically used • (messages are sent to bus to be available for everybody) • Immune for high noise • (temperature area -40 C to +125 C) • Cheap price
Protocol For Vehicle Buses • CAN (Controller Area Network) • most European vehicle • both classB & classC • LIN (Local Area Network) • all vehicles in future • classA • VAN (Vehicle Area Network) • French vehicles (Renault, …) • both classB & classC
Protocol For Vehicle Buses (Con) • ABUS • VW • D2B () • Mercedes • classD • TTP(Time Trigger Protocol)
Basic properties • Fast (up to 1Mbps) • Prioritization • Configuration flexibility • Multi master • Multicast • Powerful error detection
CAN Connector 1. nc 2. CAN L 3. CAN GND 4. nc 5. CAN-shield 6. GND 7. CAN H 8. nc 9. CAN V+
Collision resolution • bitwise arbitration • CSMA/CD (carrier sense multiple access / collision detection)
Data rate • 1 Mbps for bus length of up to 40m. • 500 Kbps for bus length of up to 100m. • 250 Kbps for bus length of up to 200m. • 125 Kbps for bus length of up to 500m