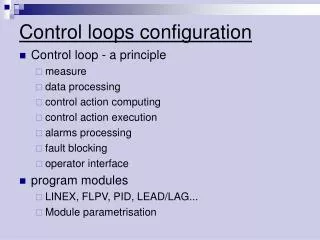
maxon motion control: Control loops, Controller properties
maxon motion control: Control loops, Controller properties. Control and feedback Power, power stages Communication Features and demonstration of a positioning system. What to control: position, speed, current (torque)? Which commutation type: DC, EC, block, sensorless, sinusoidal?

maxon motion control: Control loops, Controller properties
E N D
Presentation Transcript
maxon motion control:Control loops, Controller properties Control and feedback Power, power stages Communication Features and demonstration of a positioning system
What to control: position, speed, current (torque)? Which commutation type: DC, EC, block, sensorless, sinusoidal? How to control: open – closed loop, 1Q – 4Q How to measure the feedback value? What kind of Signals: digital - analog? How much power: current and voltage, voltage drops? Controller power stage: linear, pulsed, chokes? Special features: time scales, braking, measuring motor currents maxon motor control
Motion control: servo system electr. energy PC, PLC motion command set value controller amplifier energy losses current servo amplifier position signal speed signal motor position, speed sensor load position, speed mech. energy
What to control ? • Current control = torque control • maintaining current (torque) constant • mostly included in controller (but not always accessible) • for fast motor reaction • no special feedback device needed • Speed control • maintaining speed constant • "speed = 0" does not mean "position is held" • all maxon controllers can act as speed controllers • Position control • moving from position to position, stop at and maintain a position • maxon controllers: EPOS, EPOS P, and MIP
Motor type? Commutation? 4-Q DC servoamplifier • LSC (50 W), ADS (250 W, 500W) 1/4-Q-EC amplifier • AECS (sensorless, 100 W) • DEC (24 W-700 W, Hall sensor), block commutation 4-Q-EC servoamplifier • DES (250 W, 700W), sinusoidal commutation Position control • MIP (DC or EC, 50-500 W), block commutation • EPOS (DC or EC, 20-700 W), sinusoidal commutation • EPOS P (DC or EC, 120W), Sinusoidal commutation DC motor speed controller EC motor commutation and speed controller DC or EC motor position controller
Which motor type, commutation? • For which motor types is the controller made: DC, EC, Stepper • With EC motors: • What commutations system is foreseen? • Block with Hall sensors, sensorless • Sinusoidal commutation • What kind of position sensors are needed for commutation? • Hall sensors • Encoder (resolution, channels, line driver)
actuator actuator actuator How to control: open vs. closed loop? • open loop • no feedback • output is not measured and checked • closed loop • feedback loop • output value is measured and the set value is adjusted , accordingly • "Feed forward" • system behaviour is anticipated set value output set value output + - measured value feedback sensor feed forward output set value + -
Open-loop systems: examples maxon controller: LSC (Uadj), DEC (open loop) AECS (comm. only) • DC motor operation at fixed voltage load ML n + nL U nL - set value actuator output ML M • another example: stepper motor with amplifier • set value: signal pulses • actuator: amplifier and motor • output: steps/increments
1Q-controller, 4Q-servocontroller speed n 1-Q • only motor operation (quadrant I or quadrant III) • direction reverse by digital signal • braking is not controlled (friction), often slow 4-Q • controlled motor operation and braking in both rotation directions • mandatory for positioning quadrant II braking cw quadrant I motor drive cw n n M M torque M M M n n quadrant III motor drive ccw quadrant IV braking ccw
DEC 50/5 DECV 50/5 DEC 70/10 DES sensors Hall Sens. Hall Sens. Hall Sens. Encoder, HS commutation Block Block Block Sinusodial n-feedback with HS HS HS Encoder operation ranges 2x 1Q 2x 2Q "4Q" (2x 2Q) 4Q cw cw cw cw 0..5V 0..5V +10 V … -10 V +10 V 5V … -10 V 0V 1000 min-1 500 min-1 torque cw torque ccw DIR DIR 0..5V 0..5V ccw ccw ccw ccw open loop yes no yes with IxR (4Q) no current mode yes no yes yes specially for EC(-max)16/22 EC 45, EC 60 with low R with Icont > 2A see chapt. 4.2
Nested current controller 4-Q current controller e.g. ADS, DES, DEC 70/10 power amplifier set value speed DSP current command motor set value position current feedback path generator encoder position decoder position feedback
How to measure the feedback value? motor controller set value system deviation + + - - current- feedback sensor actual value incremental encoder IxR DC tacho Hall sensor resolver DC motor speed controller DC or EC motor position controller EC motor speed controller
How to measure the feedback value? • Open loop • no feedback system • DEC, AECS for commutation only • Current control • no special feedback • Speed control • feedback devices for DC motors: Encoder, DCTacho, IxR • feedback devices for EC motors: Encoder, Hall-Sensors, sensorless commutation frequency • Position control • feedback devices: Encoder, Hall-Sensor
special DC speed controller: IxR Imot IxR compensation Rmot. K motor L + set value Umot R + + - EMF motor voltage K Umot maxon examples: LSC, ADS • without speed sensor, low price, few cables • feedback value: motor voltage • set value: compensation for the voltage drop over Rmot • compensation factor adjusted on controller (ideal = Rmot) • not very dynamic, not very stable (Rmot depends on temperature)
How to command? Signal processing? • analog signal processing • for speed and current controllers • set values from external voltages, internal or external potentiometers • very high bandwidth • problem of temperature drifts • digital commands and signal processing • more sophisticated digital speed and position controllers • commands from PC, PLC or microprocessors. A/D converted voltages • no temperature drifts • parameters set by software, can be recorded and transferred • bandwidth limited by calculation performance of DSP or microcontroller
Analog encoder speed control loop • speed control loop with encoder feedback • amplification (gain) depends on parameters PID • applies also to Hall Sensor feedback with EC motors (6 IMP) • current control loop • subordinate control loop, enhances system dynamics • power amplifier (MOSFET) maxon examples: LSC, ADS, (AECS) speed amplifier (PID) power amplifier R set value speed current current command E motor + + - - current- feedback C speed feedback encoder
Digital control loop maxon examples: DES, DEC, PCU, MIP, EPOS • digital parameters (profile, position, amplification) • DSP: digital signal processor • Firmware: software of the controller power amplifier set value speed DSP current command motor current feedback set value position path generator position decoder position feedback encoder speed feedback
Gain, amplification: PID amplifier (PID) set value E current command • P: Proportional (a multiplication = "amplification") • Problem: very small deviation lead to small corrections only. The set value cannot be reached. • Remedy: Combination of P and I • I: Integration • A persisting deviation is summed up (integrated) and eventually corrected. • D: Differentiation • a sudden increasing deviation (e.g. a set value jump), produces a strong reaction • for dynamic reaction • overshoot, instability How the deviation signal E is it amplified to produce a purposeful reaction (current command)? + actual value system reaction PI P only PID set value Zeit
How much power? Amplifier limits • voltage drop over • the power stage: • 5 -10% • LSC: 5V thermal limit of the amplifier or the motor (adjustable) max current: different possibilities voltage Vcc,max Umot,max reserve ~20% continuous operation short term operation Vcc,min Icont Imax current
Amplifier limits - motor selection • reserve: ~20% • variations of the supply voltage • load variations • varying friction • tolerances of the components • varying ambient conditions speed thermal limit of the amplifier or motor n0,max Vcc,max continuous operation max. current Umot,max short term operation Mcont Icont Mmax Imax torque current
M Power stage: linear, pulsed? Chokes? • 4-Q power stage: • Linear • MOSFETs acting as valves, driven by analog voltages • Pulsed • MOSFETs acting as switches 4 power MOSFETs motor Vcc UT1 Umot UT2 Gnd
M controller Linear power stage Umot, Imot LSC Vcc time advantages • simple, low priced controller • low electromagnetic noise level • no minimum inductance needed disadvantages • high power losses at the final stage at high currents or low motor voltages (PV = R I2) • for small nominal power up to 100 W R UT Umot Gnd
pulse generator M Pulsed power stage (PWM) advantages • low power losses • high efficiency • for higher nominal power disadvantages • electromagnetic noise in the radio frequency range • high power losses in the motor at standstill • minimum inductance necessary Vcc power stage Umot Gnd ADS, DEC, AECS, DES, MIP, PCU, EPOS Umot, Imot time cycle time: 20 - 50 ms
Pulsed power stage: current ripple • general measures: • reduce motor voltage • enhance total inductance • motor choke in controller • additional motor choke • enhance PWM frequency low motor inductance 50% 50% Umot, Imot additional motor choke 30% 70%
Special features • time scales in drive control • names of maxon controllers • encoder installation tips • braking • accuracy of speed control • measuring motor currents
Time scales in control loops frequency kHz 50 20 10 5 2 1 0.5 0.2 0.1 0.05 mechanical time constants "slow" position controller position controller MIP speed controller current controller speed controller as "link" between fast current controller and a slow position control (PLC) PWM cycle time 0.02 0.05 0.1 0.2 0.5 1 2 5 10 20 ms cycle time
maxon abbreviations for controllers others: LSClinear servo controller PCUposition control unit MIP mini position control EPOSeasy to use positioning system EPOS P easy to use positioning system Programmable signal processing A analog D digital amplifier type C 1Q – controller (2x 2Q) S 4Q - servocontroller max. supply voltage in V AECS 35 / 3 max. continuous current in A motor type D DC motor E EC motor commutation type S sensorless V improved
Encoder installation tips • use line driver • to enhance signal quality • with long encoder lines • mandatory for position control • use shielded cables • use twisted encoder cables • A with /A • B with /B • I with /I • separate encoder and motor lines • particularly with PWM amplifiers • look up details in FAQ
Braking energy in 4-Q amplifier • during braking energy flows back from motor • part of this energy can be absorbed in the amplifier, or it is fed back to the power supply: capacitance C C "full": • supply voltage increases • damage to controller
Braking energy: Solutions 1st choice reduce acceleration rate (e.g. DES) power supply controller 2nd choice add electrolyte capacitance C power supply controller 3rd choice add. shunt regulator C power supply controller R DSR 70/30 235811 DSR 50/5 309687
Accuracy of speed control What can accuracy of speed control mean ... • absolute accuracy: speed corresponds exactly to the set value, e.g. 1000 rpm • repeatability: speed deviation at identical set values • linearity: 1 V set value = 1'000 rpm 10 V set value = 10'000 rpm -1 V set value = -1'000 rpm • long time stability: today 1'000 rpm, and in a year? • drift stability: speed deviation because of temperature drifts (warm up) • short time stability: e.g. within one motor revolution (torque ripple, speed ripple) • dynamic accuracy: speed deviation after • a perturbation (load change) • changing the set values
Accuracy of speed control … and most of the time, this is what the customer thinks of • static accuracy due to load changes: • static/constant speed deviation after a certain time following a load change • given as % of the whole control (speed) range example • 1% accuracy at maximum speed of 5000 rpm • at 5000 rpm: speed deviation of 50 rpm (4950 rpm; 1%) at load change from 0 to nominal torque • at 100 rpm: speed deviation of 50 rpm (50 rpm; 50%) at load change from 0 to nominal torque
Measuring motor currents PWM controller acts as an electronic transformer: • input power (from power supply) = output power (to motor) • motor voltage lower than supply voltage • motor current Imot higher than supply current power supply A PWM controller A DC motor do not measure here DC: measure here with a true RMS Amp-meter EC: with an oscilloscope (blocked shaft at max. phase current) use current monitor A PWM controller EC motor