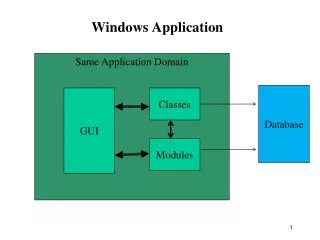
Windows Application Development
This chapter explores Windows thread management, focusing on its objectives and benefits. By the end, you'll be able to describe thread management, utilize threads in Windows applications, apply C library functions with threads, and build and execute threaded applications. Key benefits include simpler programming models, faster code execution, and better resource utilization through multiprocessing. However, risks such as potential performance issues and defects are addressed. The contents cover an overview of processes and threads, thread management intricacies, and practical demonstration lab exercises.

Windows Application Development
E N D
Presentation Transcript
Windows Application Development Chapter 7 Windows Thread Management
Objectives and Benefits Upon completion of this chapter, you will be able to: • Describe Windows thread management • Use threads in Windows applications • Use threads with C library functions • Build and execute threaded applications • Describe scheduling and SMP operation
Threads: Benefits and Risks • Benefits • Simpler program models • Faster code – in many cases • Exploit multiple processors • Exploit inherent application parallelism • Reliable, understandable, maintainable code • Risks • Slower performance – in some cases • Potential defects
Contents 1. Process and Thread Overview 2. Thread Management 3. Waiting for Thread Termination 4. The C Library and Threads 5. Demonstration: Building a Threaded Application 6. Thread Priority, Scheduling, SMP Impact 7. Lab Exercise 7-1
1. Process and Thread Overview • Threads in a process share data and code • Each thread has its own stack for function calls • Calling thread can pass an argument to a thread at creation time • This argument is on the stack • Each thread can allocate its own Thread Local Storage (TLS) indices and set TLS values
Process and Thread Overview • Threads are scheduled and run independently • The executive schedules threads • Threads run asynchronously • Threads can be preempted • Or restarted at any time
Processes and Threads Process Code Global Variables Process Heap Process Resources Open Files Heaps… Environment Block Thread 1 Thread N Thread Local Storage Thread Local Storage ... Stack Stack
Threads Performing Parallel Tasks Single-Threaded Program Multithreaded Program Thread 1 Thread 2 Read File A Read File A Read File B Read File B Wait forThread 1 andThread 2 to finish Thread 3 Merge datafrom both files Merge datafrom both files Thread 3 Reading File B beforeFile A would give the same results
2. Thread Management • Creating a Thread • The Thread Function • Thread Termination • Thread Exit Codes • Thread Identities • Suspending and Resuming Threads
Creating a Thread (1 of 6) • Specify the thread’s start address within the process’ code • Specify the stack size, and the stack consumes space within the process’ address space • The stack cannot be expanded
Creating a Thread (2 of 6) • Specify a pointer to an argument for the thread • Can be nearly anything • Interpreted by the thread itself • CreateThread returns a thread’s ID value and its handle • A NULL handle value indicates failure
Creating a Thread (3 of 6) HANDLE CreateThread ( LPSECURITY_ATTRIBUTES lpsa, DWORD cbStack, LPTHREAD_START_ROUTINE lpStartAddr, LPVOID lpvThreadParm, DWORD dwCreate, LPDWORD lpIDThread )
Creating a Thread (4 of 6) • Parameters lpsa • Security attributes structure (use NULL) cbStack • Byte size for the new thread’s stack • Use 0 to default to the primary thread’s stack size (1 MB)
Creating a Thread (5 of 6) lpStartAddr • Points to the function (within the calling process) to be executed • Accepts a single pointer argument and returns a 32-bit DWORD exit code • The thread can interpret the argument as a DWORD or a pointer lpThreadParm • The pointer passed as the thread argument
Creating a Thread (6 of 6) dwCreate • If zero, the thread is immediately ready to run • If CREATE_SUSPENDED, the new thread will be in the suspended state, requiring a ResumeThread function call to move the thread to the ready state lpIDThread • Points to a DWORD that receives the new thread’s identifier; NULL OK on W2000/NT
The Thread Function DWORD WINAPI MyThreadFunc ( PVOID pThParam ) { . . . ExitThread (ExitCode); /* OR */ return ExitCode; }
Thread Termination (1 of 3) • Threads are terminated by ExitProcess • The process and all its threads terminate • The exit code returned by the thread start function same as the process exit code • Or a thread can simply return with its exit code
Thread Termination (2 of 3) • ExitThread is the preferred technique • The thread’s stack is deallocated on termination VOID ExitThread (DWORD (dwExitCode) • When the last thread in a process terminates, so does the process itself
Thread Termination (3 of 3) • You can terminate a different thread with TerminateThread • Dangerous: The thread’s stack and other resources will not be deallocated • Better to let the thread terminate itself • A thread will remain in the system until the last handle to it is closed (using CloseHandle) • Then the thread will be deleted • Any other thread can retrieve the exit code
Thread Exit Codes BOOL GetExitCodeThread ( HANDLE hThread, LPDWORD lpdwExitCode ) lpdwExitCode • Contains the thread’s exit code • It could be STILL_ACTIVE
Thread Identities (1 of 2) • A thread has a permanent “ThreadId” • A thread is usually accessed by HANDLE • An ID can be converted to a HANDLE
Thread Identities (2 of 2) HANDLE GetCurrentThread (VOID); DWORD GetCurrentThreadId (VOID); HANDLE OpenThread ( DWORD dwDesiredAccess, BOOL InheritableHandle, DWORD ThreadId ); /* >= Windows 2000 only */
Suspend & Resume Threads (1 of 2) • Every thread has a suspend count • A thread can execute only if this count is zero • A thread can be created in the suspended state • One thread can increment or decrement the suspend count of another: DWORD ResumeThread (HANDLE hThread)
Suspend & Resume Threads (2 of 2) DWORD SuspendThread (HANDLE hThread) • Both functions return previous suspend count • 0xFFFFFFFF indicates failure • Useful in preventing “race conditions” • Do not allow threads to start until initialization is complete • Unsafe for general synchronization
3. Waiting for Thread Termination • Wait for a thread to terminate using general purpose wait functions • WaitForSingleObjector WaitForMultipleObjects • Using thread handles • The wait functions wait for the thread handle to become signaled • Thread handle is signaled when thread terminates
Waiting for Thread Termination (2 of 2) • ExitThread and TerminateThread set the object to the signaled state • Releasing all other threads waiting on the object • ExitProcess sets the process’ state and all its threads’ states to signaled
The Wait Functions (1 of 2) DWORD WaitForSingleObject ( HANDLE hObject, DWORD dwTimeOut )
The Wait Functions (2 of 2) DWORD WaitForMultipleObjects ( DWORD cObjects, LPHANDLE lphObjects, BOOL fWaitAll, DWORD dwTimeOut ) • Return: The cause of the wait completion
Wait Options (1 of 2) • Specify either a single handle hObject • Or an array of cObjects referenced by lphObjects • cObjects should not exceed MAXIMUM_WAIT_OBJECTS - 64
Wait Options (2 of 2) • dwTimeOut is in milliseconds • 0 means the function returns immediately after testing the state of the specified objects • Use INFINITE for no timeout • Wait forever for a thread to terminate • GetExitCodeThread • Returns the thread exit code
Wait Function Return Values (1 of 3) • fWaitAll • If TRUE, wait for all threads to terminate Possible return values are: • WAIT_OBJECT_0 • The thread terminated (if callingWaitForMultipleObjects;fWaitAll set)
Wait Function Return Values (2 of 3) • WAIT_OBJECT_0 + n where 0 <= n < cObjects • Subtract WAIT_OBJECT_0 from the return value to determine which thread terminated when calling WaitForMultipleObjects with fWaitAll set • WAIT_TIMEOUT • Timeout period elapsed
Wait Function Return Values (3 of 3) • WAIT_ABANDONED • Not possible with thread handles • WAIT_FAILED • CallGetLastError for thread-specific error code
4. The C Library and Threads • Nearly all programs (and thread functions) use the C library • But the normal C library is not “thread safe” • The C function _beginthreadex has exactly the same parameters as CreateThread
Using _beginthreadex (1 of 3) • Cast the _beginthreadex return value to (HANDLE) • Use _endthreadex in place of ExitThread • #include <process.h>
Using _beginthreadex (2 of 3) • Set the multithreaded environment as follows: • #define _MT in every source file before <windows.h> • Link with LIBCMT.LIB • Override the default library
Using _beginthreadex (3 of 3) • Preferred method using Visual C++ • From the menu bar: • Build Settings — C/C++ Tab • Code Generation category • Select a multithreaded run-time library
Ex: A Simple Boss Thread HANDLE hWork[K]; volatile LONGLONG WorkDone[K], iTh; /* !! */ . . . for (iTh = 0; iTh < K; iTh++) { WorkDone[ith] = 0; hWork[iTh] = _beginthreadex (NULL, 0, WorkTh, (PVOID)&iTh, 0, NULL); /* BUG! */ } WaitForMultipleObjects (K, hWork, TRUE, INFINITE); for (iTh = 0; iTh < K; iTh++) printf (“Thread %d did %d workunits\n”, iTh, WorkDone[iTh]);
Ex: A Simple Worker Thread DWORD WINAPI WorkTh (PVOID pThNum) { DWORD ThNum = (DWORD)(*pThNum); while (. . .) { /* Perform work */ WorkDone[ThNum]++; } _endthreadex (0); }
5. Demonstration: Building a Threaded Application • Using Visual C++ Ver. 6.0, 7.0
Demonstration (1 of 2) • Implement multithreaded word count program wcMT • Include the source code of wc with your application and execute it as a thread • Create one thread for each file to analyze • Compare performance of single process, multi-ple process, & multiple thread implementations • If you use other libraries, build thread-safe versions now!
Demonstration (2 of 2) • THIS IS A BOSS/WORKER SYSTEM • Shows common thread management techniques • See picture on the next overhead • CHALLENGE: • Also try at wcMTx.c and wcMTxx.c • These contains some common bugs • What are the bug symptoms?
Boss/Worker Model for wcMT Program Resources Workers Thread 0 Boss Files main () Thread 1 Thread K
6.Thread Priority and Scheduling • Windows kernels run the highest-priority thread that is ready for execution • 4 priority classes set by CreateProcess • IDLE_PRIORITY_CLASS (base priority 4) • NORMAL_PRIORITY_CLASS (9 or 7) • HIGH_PRIORITY_CLASS (13) • REALTIME_PRIORITY_CLASS (24) • Windows XP extensions
Thread Priority (1 of 2) • Change or determine a thread’s priority • For itself • For another process, security permitting DWORD SetPriorityClass ( HANDLE hProcess, DWORD dwPriority) DWORD GetPriorityClass ( HANDLE hProcess)
Thread Priority (2 of 2) • Thread priorities set relative to base priority • THREAD_PRIORITY_LOWEST • THREAD_PRIORITY_BELOW_NORMAL • THREAD_PRIORITY_NORMAL • THREAD_PRIORITY_ABOVE_NORMAL • THREAD_PRIORITY_HIGHEST
Process Priority Cautions • Use high thread priorities with caution • Avoid real time priorities for user processes • User threads may preempt executive threads • Assure fairness • All threads should run eventually • Real time priorities may prevent fairness • “Priority inversion” • “Thread starvation”
Thread States and Transitions (1 of 2) • A thread is running when it is on a processor • SMP systems have multiple processors • Intel Xeon provides single processor multiprocessing - Hyperthreading • The executive can place a running thread in the wait state • I/O operations wait wait for data transfer • The thread is blocked or sleeping • A thread is ready if it could be running
Create a new thread Goes to ready queue Thread Id is reused Initialized Object is signaled Ready Waiting Terminated Wait, Sleep Or any blocking call Time slice is over ExitThread TerminateThread Scheduled on a free processor Running
Thread States and Transitions (2 of 3) • The scheduler can place a ready thread on any available processor • The executive moves a running thread to the ready state if the thread’s time slice expires • Sleep(0) moves a running thread to ready • The executive makes a waiting thread ready as soon as appropriate handles are signaled • The thread wakes up