Download
1 / 22
230 likes | 250 Views
Explore the integration of allometric constraints into Single-Tree Remote Sensing using LiDAR and aerial images to improve accuracy in measuring tree parameters like height, crown width, and species recognition. The study investigates algorithms, data collection, and processing techniques for better forest inventory and tree analysis.

E N D
Ilkka Korpela University of Helsinki Incorporation of Allometry into Single-Tree Remote Sensing with LiDAR and Multiple Aerial Images
Contents Single-tree remote sensing, STRS Coupling allometric constraints to STRS A STRS SYSTEM - Treetop positioning with template matching (TM) - Treetop positioning with multi-scale TM - Species recognition in aerial images - LS-adjustment of crown models with lidar points Results and Conclusions, Demos
Single-Tree Remote Sensing (STRS) • Rationales: Forest inventory, 3D models • Since 1930s→ “Substitute for arduous and expensive field measurements of trees” 2D/3D positionSpeciesHeightCrown dimensions Stem diameter
Single-Tree Remote Sensing • Airborne, active / passive • 2D or 3D • Direct estimation & indirect allometric estimation • Restrictions: Tree discernibility: detectable object size, occlusion and shading, interlaced crowns • Alternative or complement • Accuracy restricted by “allometric noise” → tree and stand- level bias, tree-level imprecision in dbh~10-12 %. • Measurements subject to bias • Timber quality remain unsolved, only quantity • Unsolved issues: 1. Species recognition
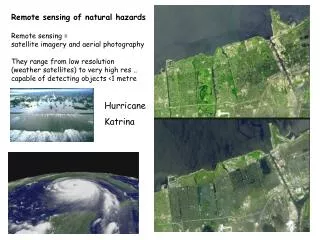
Photogrammetric STRS • Scene and object variation • Occlusion & shading • Scale: h = 0..40 m, dcrm 0..10 m • BDRF→ automation challenging
Manual STRS - Demo3D treetop, height, crown width, Speecies stem diameter = f(Species, height, crown width)Image matching fails for treetop positioning unless we use a feature detector for treetops Demo – Single-Scale TM in treetop positioning PFG 1/2007
Airborne LiDAR in STRS + No texture needed+ Active → no shading+ Real ease of 3D − Discrete sampling− High sampling rates are costly− Reconstructing high-frequency relief− Species recognition− Underestimation of height Algorithms that process point clouds directly or interpolated DSMs / CHMs
Coupling allometric constraints to the STRS tasks Regularities in the relative sizes of plant partsReduce ill-posedness of STRSDoes species give the shape of the “crown envelope” ?
Coupling allometric constraints to the STRS tasks Empirical data on conditional distribution ofCrown width & Shape | (Sp, height) → Consistency of measurements, Rule out impossible observations → Initial approximations for iterative approaches in finding true crown shape“Short trees have small crowns” Adjust search space accordingly
Multi-scale TM – Treetop positioning Assume that the optical properties and the shape of trees are invariant to their size. I.e. small trees appear as scaled versions of large trees in the images (within one species and within a restricted area)
Multi-scale TM in 3D treetop positioning Maxima at different scales, take global → (X,Y,Z)
Multi-scale TM – Crown width estimation Demo 2 Near-nadir views have been found best for the manual measurement of crown width in aerial images
Species recognition Variation: - Phenology- Tree age and vigor- Image-object-sun geometry=> reliable automation problematic => bottleneck Spectral valuesTexture
LS-adjustment of a crown model with lidar points Assume that 1) Photogr. 3D treetop position is accurate 2) Trees have no slant 3) Crowns are ± rotation symmetric 4) We know tree height and species approximation of crown size and shape → LiDAR hits are “observations of crown radius at a certain height below the apex” Assume a rather large crown and collectLiDAR hits in the vicinity of the 3D treetop position. Use LS-adjustment to find a crown model.
“LiDAR hits are observations of crown radius at a certain height below the apex?”
LiDAR hits are observations of crown radius at a certain height below the apex – what if crowns are interlaced?”
Example - a 19-m high spruce: Solution in three iterations. Final RMSE 0.31 m Note apex! LiDAR did not hit the apex and the “crown width at treetop” (constant term) is negative.
Example - a 22-m high birch: Solution in six iterations. Final RMSE 0.47 m For some reason RMSEs are larger for birch in comparison to pine and spruce. Convergence?
Conclusions and outlook A 1) Multi-scale TM works in a manual semi-automatic wayfor 3D treetop positioning - Possible to automate? - Computation costs? (NCC) 2) Multi-scale TM in crown width estimation needscomprehensive testing (Image scales, required overlaps)3) Species recognition was overlooked here, 3D treetop positions help? 4) Use of LiDAR points LS-adjustment of a crown model: - Aggregated crowns are problematic. - Inherent underestimation of crown extent
Conclusions and outlook B If we have a STRS system that can be operated so that a tree measurement takes 3-6 seconds and the measurement inaccuracies (RESULTS) are : heigth ~ 0.6 m crown width ~ 10% stem diameter ~ 13-18 % XY position ~ 0.3 m Species classification ~ 95% Is this fast and accurate enough for sample-plot basedSTRS? Can we afford the images and LiDAR?Can we compete against area-based methods?
ISPRS SILVILASER 2007 WORKSHOP, ESPOO SEPTEMBER 12-14, 2007HUT / FGI