Download
1 / 13
130 likes | 279 Views
EE3190 Optical Sensing and Imaging. Discrete Systems. Linear Systems. Superposition. x’. x. Linear Systems. Superposition. x’. x. Linear Systems. Superposition. x’. x. Linear Systems. Superposition. x’. x. Linear Systems. Superposition. x’. x. Linear Systems. Superposition.

E N D
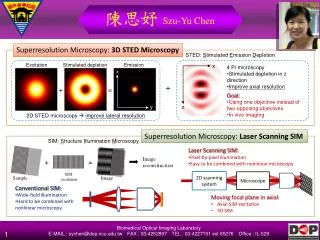
EE3190 Optical Sensing and Imaging Discrete Systems
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Linear Systems • Superposition x’ x
Matlab Implementation N = 64; M = 128; lambda = 1e-6; d = 50; dx = 0.01; x = [-N:1:N]*dx; dy = 1.25e-5; y = [-M:1:M]*dy; [xx,yy] = meshgrid(x,y); K = exp(j*2*pi*d/lambda)/sqrt(j*lambda*d); H = K*exp(j*(pi/(lambda*d))*(xx-yy).^2);
Matlab Implementation U0 = (abs(x) <= 1/2); figure(1); clf; plot(x, U0); ylabel('amplitude'); xlabel('position');
Matlab Implementation U0 = reshape(U0, 2*N+1, 1); U1 = H*U0; figure(2); clf; plot(y, abs(U1)); ylabel('amplitude'); xlabel('position');