Download
1 / 21
210 likes | 382 Views
NOAA-18 HIRS/4 Postlaunch Calibration Changyong Cao 1 , Alex L. Wang 2 , and Pubu Ciren 2 1 NOAA/NESDIS/ORA 2 QSS Group, Inc. Presented at the ORA NOAA-18 Cal/Val working group meeting, Airmen memorial building, Aug. 9, 2005. NOAA-18/HIRS/4 features.

E N D
NOAA-18 HIRS/4 Postlaunch Calibration Changyong Cao1, Alex L. Wang2, and Pubu Ciren2 1NOAA/NESDIS/ORA 2QSS Group, Inc. Presented at the ORA NOAA-18 Cal/Val working group meeting, Airmen memorial building, Aug. 9, 2005
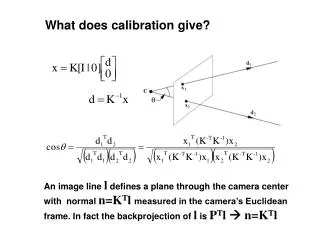
NOAA-18/HIRS/4 features • FOV 10 KM (0.7 deg) compared to 20KM in HIRS/3 (NOAA-KLM) to facilitate “hole hunting” in cloud clearing • Instrument changes driven by new FOV • Colder detector temperature (94 K from 100K) • Cold stop near the detector • Field stop change • An additional PRT in the center of the blackbody • 10 KM HIRS is effectively a new instrument, and its postlaunch performance has not been proven previously • De facto changes: • Filter temperature increased 5 K to ~297K (increased background flux at the detector) • Spectral response function (SRF) changes due to procurement procedure (KLM batch similar, N in different batch). Rdet = Rtarget + Rself OPTICS detector
The NOAA-18/HIRS noise problem Counts for the LW channel jump from one FOV to the next significantly, and almost randomly, regardless of space, blackbody or earth view. The noise has dropped significantly in a couple of weeks after launch. HIRS/4 NEDN specification vs. actual
NOAA-18/HIRS longwave channel NEDN (updated Aug 04, 2005) CH SPEC. X SPEC 04-Aug 23-Jun 15-Jun 07-Jun 1 3.00 N/A N/A N/A 2.5 2 0.67 1.35 1.27 2.6 4.2 3 0.50 0.770.71 1.5 2.6 4 0.31 1.34 1.28 2.8 5.3 5 0.21 1.56 1.57 3.3 5.4 6 0.24 1.40 1.33 2.9 4.6 7 0.20 1.33 1.24 2.8 4.7 8 0.10 1.04 1.00 2.1 3.8 9 0.15 1.15 1.15 2.4 4.1 10 0.15 1.92 1.83 3.9 6.5 11 0.20 0.990.94 2.1 3.6 12 0.20 0.960.96 2.0 3.2 NEDN Unit: mW/(m^2-sr-cm^-1) • Channel 1 can not be calibrated because the spaceview is out of range most of the time. • NEDN relatively stable • Ch3 now meets the NEDN noise spec. • Ch 11, and 12 NEDNs fluctuate around the spec. Note: NOAA-18/HIRS trending for all major parameters are now available at http://www.orbit.nesdis.noaa.gov/smcd/spb/multisensor/hirs/nedn
NOAA-18/HIRS Sample Orbit (June 7, 2005) Brightness Temperature for 19 IR channels ch1 ch2 ch3 ch4 ch5 ch6 ch7 ch8 ch9 ch10 ch11 ch12 ch13 ch14 ch15 ch16 ch17 ch18 Chs 1-12 longwave channels do not meet the spec Ch 12 for water vapor
NOAA-18/HIRS Sample Orbit (Aug 4, 2005)Brightness Temperature for 19 IR channels ch1 ch2 ch3 ch4 ch5 ch6 ch7 ch8 ch9 ch10 ch11 ch12 ch13 ch14 ch15 ch16 ch17 ch18
A distinct signature of the NOAA18/HIRS noise Counts for 56 FOVs show the correlation for all 12 channels • The counts for the LW channels are correlated, which somewhat resembles crosstalk between channels (either optical or electronic). longwave Ex: correlation between ch1 and ch11 Other channel combinations similar Space dwell data for 300 scanlines June 9, 2005 HIRS optical layout
Three Sample Rotations of the FilterwheelDwell dataset 1, June 9, 2005 • Counts jump up and down together across channels (before noise drop) Two patterns: 1st half vs. 2nd half of the filterwheel (after noise drop) Note: count values across channels may not be directly comparable: - ch 1, 8, 9 each has its own gain; chs 2-7 have the same gain; - chs 10-12 have the same gain
Time Sequence and Channel Correlation Analysis • For each HIRS FOV cycle, dVch = Vch – Vch0 - V0 Where dVch = delta volt for a channel; Vch = volt for a channel; Vch0 = channel reference volt; ch = 1, 2, 3, 4, 11, 7, 8, 10, 6, 5, 12, 9 (in order); V0 = value for the clamp target, which is set to 0 once each cycle (every 0.1 sec, or one rotation of the filterwheel). • For HIRS, counts for each channel is generated separately, one at a time with the rotation of the filterwheel. It is very difficult to get output counts that are correlated across channels at all times. • Therefore, very few places in the instrument can produce this signature. Possibilities: • Clamp system and related circuit. • Other possibilities: must be able to produce this signature, which is difficult. Clamp target HIRS filterwheel (inner ring for LW channels) Vch0 Vch V0
Identify noise frequency using FFT(parked spaceview data) Channel 2 Channel 13 before after Note: red lines used as masks for sampling gap frequencies between scanlines
NOAA-18/HIRS anomaly investigation • NOAA-18/HIRS investigation “Tiger” team lead by Steve Glockner of NASA; team members from ITT, OSD, MIT/LL, and ORA; Weekly telecons to report findings • Noise characterization: • Spectral correlation of the output counts, spatial patterns • Noise frequency analysis • Possible causes (optical vs. electronic): • Fault tree with numerous possibilities • Clamp mechanism (related to the filterwheel) • External interference • Contamination • Other • Tests have been done: • Space/blackbody dwell tests (several times): noise characterization • Filterwheel in high power mode: filterwheel related • AMSU parked at warm target: noise: external interference • Tests may be needed: • Patch temperature control off • Restart • Re-outgas (possible?)
Web-based trending system developed • Monitoring calibration coefficients, instrument noise, calibration counts, and component temperatures • Very useful for monitoring instrument performance, trouble shooting, and instrument diagnosis Channel 12 slope Ch2 noise: SV > BB view Filterwheel housing temperature URL: http://www.orbit.nesdis.noaa.gov/smcd/spb/multisensor/hirs/nedn
Calibration bias assessments using the SNO system Different amount of bias for each channel, and not in the same direction. Suggesting SRF differences as the main cause Large variation of bias may be caused by the FOV differences between HIRS on NOAA-17 and -18
Spectral response function differencesfor HIRS on NOAA-16,-17, and -18 Ch 8, 9, 11, 12 Ch 1-7, 10 Ch 13-16 Ch 17-19
Intersatellite biases from forward calculationsArctic atmosphere
Intersatellite biases from forward calculationUS standard atmosphere
Independent assessment of navigation (experimental) Assessment using SGP4. The correct distance between nadir and position 28 is ~13.3 KM Future plans: alignment and calibration check using the moon
Lessons Learned • When the instrument performs well, postlaunch OV is straight-forward. Otherwise, it can become a stress test of the knowledge, experience, expertise, and resources. • Postlaunch instrument diagnosis can be extremely difficult due to the lack of diagnostic switches on-orbit. Any change in the instrument design, no matter how simple, can further aggravate the situation. • Inefficient diagnosis endless possible causes (mingled with the unproven 10KM HIRS) uncertainties for future launches • The HIRS FOV change (from 20 to 10KM) effectively makes it a new instrument with no proven performance track record postlaunch. It also may have negatively impacted the intersatellite calibration and time series analysis (positive impact on “hole hunting” ?). • The instrument specification for the HIRS spectral response functions (SRF) is inadequate, which allows SRFs with very different shapes meeting the same specification. This has significant implications for infrared sounding, intersatellite calibration, and time series analysis. • Implications on future instruments: • 1) More switches are desirable for on-orbit diagnosis (ex: separating optical/radiometric vs. electronic problems). • 2) Avoid design changes to operational instruments if possible (test ideas with research instruments first). • 3) The impact of instrument specification on applications must be thoroughly evaluated in risk reduction studies.
Summary • Despite the significant noise drop since launch, most longwave channels of the NOAA-18/HIRS do not meet the NEDN specification. • The effect of noise is more pronounced for cold channels, due to their low signal to noise ratio. Applications relying on spatial pattern recognition are more affected than those using spatially aggregated data. • Many lessons learned will become valuable for the cal/val of future instruments. • Web-based performance monitoring system, the SNO system, and forward calculations are very useful for instrument diagnosis and calibration bias analysis. • Toward an integrated system for cal/val, which will include radiometric, spectral, and spatial calibration for the on-orbit verification of new instruments.