
Enhancing Control Systems with Fuzzy Logic: A Study on Stability and Performance
Explore the advantages of utilizing Fuzzy Logic in dynamic feedback control systems. The study focuses on an inverted pendulum system, comparing PID and Fuzzy PID controllers in terms of stability, performance, and adaptability. Results show significant improvements in stability envelope and settling time with Fuzzy PID control.

Enhancing Control Systems with Fuzzy Logic: A Study on Stability and Performance
E N D
Presentation Transcript
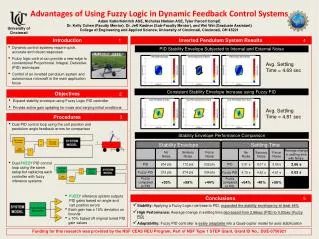
Advantages of Using Fuzzy Logic in Dynamic Feedback Control SystemsAdam Katterheinrich ASE, Nicholas Nielsen ASE, Tyler Parcell CompEDr. Kelly Cohen (Faculty Mentor), Dr. JeffKastner (Sub-Faculty Mentor), and Wei Wei (Graduate Assistant)College of Engineering and Applied Science, University of Cincinnati, Cincinnati, OH 45221 University of Cincinnati Inverted Pendulum System Results Introduction 1 4 • Dynamic control systems require quick, accurate and robust responses • Fuzzy logic control can provide a new edge to conventional Proportional, Integral, Derivative (PID) techniques • Control of an inverted pendulum system and autonomous rotorcraft is the main application focus PID Stability Envelope Subjected to Internal and External Noise PID Stability Envelope PID Envelope (Sensor Noise) PID Envelope (Force Noise) Avg. Settling Time = 4.69 sec Consistent Stability Envelope Increase using Fuzzy PID Objectives 2 • Expand stability envelope using Fuzzy Logic PID controller • Provide active gain updating for noise and varying initial conditions Fuzzy PID Stability Envelope Fuzzy PID Envelope (Sensor Noise) Fuzzy PID Envelope (Force Noise) Avg. Settling Time = 4.81 sec Procedures 3 • Dual PID control loop using the cart position and pendulum angle feedback errors for comparison Stability Envelope Performance Comparison • Dual FUZZYPID control loop using the same setup but replacing each controller with fuzzy inference systems • FUZZYinference system outputs PID gains based on angle and cart position errors • Each gain has ± 10% deviation on bounds • ± 10% based off original tuned PID gain values Conclusions 5 • Stability: Applying a Fuzzy Logic rule base to PID, expanded the stability envelope by at least 44% • High Performance: Average change in settling time decreased from 2.66sec (PID) to 0.03sec (Fuzzy PID) • Adaptability: Fuzzy PID controller is easily adaptable into a Quad-copter model for auto-stabilization Funding for this research was provided by the NSF CEAS REU Program, Part of NSF Type 1 STEP Grant, Grant ID No.: DUE-0756921





