Download
1 / 11
110 likes | 140 Views
Practical Methods for Continuous Gravitational Wave Detection Using Pulsar Timing Data. J. Ellis, F. Jenet , & M. McLaughlin. Overview. Aim: “ Determine the most sensitive practical detection technique for continuous GW sources in PTA data ” Methods compared:

E N D
Practical Methods for Continuous Gravitational Wave Detection Using Pulsar Timing Data J. Ellis, F. Jenet, & M. McLaughlin
Overview • Aim: “Determine the most sensitive practical detection technique for continuous GW sources in PTA data” • Methods compared: • Matched filtering (various realisations) • Power spectral summing • Figures of merit: • Minimum detectable amplitude (relative to other methods) • Compute load • Important simplifying assumptions: • No frequency evolution • Perfect sinusoids (no eccentricity) • Data: white, regularly-sampled, “stationary”
Data used • Up to 100 pulsars • Uniform sky distribution, random distance distribution (0.5-3kpc) • 10 years, 250 TOAs , regular (~bimonthly) sampling • White residuals, 100-300ns RMS • “In real pulsar timing data, the residuals will be unevenly sampled and the noise may have various red components. In addition, the pulsar timing residuals will not be stationary, as a quadratic must be fit out of the data to account for the spindown of the pulsar. Specifically, our definition of the inner product in Eq. 16 no longer holds as we will need to include the covariance matrix of the data and incorporate a linear operator that takes into account this fitting. This […] will be addressed in future papers. However, here we will deal with the simple case to illustrate the efficacy of the studied search techniques on a data set of optimal quality.”
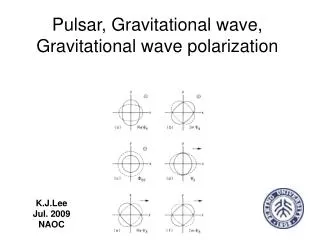
Matched filtering process • Define a vector of search parameters: • Compute inner product of data (x) with template (r): • Define a (log-)likelihood function: • False alarm probability? • Maximise this likelihood function using various l realisations.
Full filter Earth term only
Power Spectral Summing • Similar to Yardley et al. (2010) • Claim detection when this value > threshold based on false alarm rate • “Bad”: gives detection but no source parameters • “Good”: no reliance on templates Npsr
Result Lower false-alarm probability assuming only one template, matching the data
Result The “best we’ll ever do” might not be that good! (Note, longer Tobs not considered) Pairwise/Full: Similar results for current experiments!
Summary • Your analysis method choice will depend on: • Your compute cluster size • Your expected signal strength • Whether you need to locate the position really well • Whether you know anything about your target vs. blind sky search • How many pulsars you have fewer templates = lower false-alarm rate