Understanding Random Variables in Digital Communications
510 likes | 639 Views
This overview delves into the concept of random variables within digital communications, illustrating how message signals can appear random. It explains notation for random variables and differentiates between discrete and continuous cases with their respective probability mass functions (PMF) and cumulative distribution functions (CDF). Key statistical measures such as mean, standard deviation, and autocorrelation are elucidated, along with special distributions like uniform and normal. The text also touches on random processes, stationarity, and ergodicity, underpinning the importance of these concepts in communication systems.

Understanding Random Variables in Digital Communications
E N D
Presentation Transcript
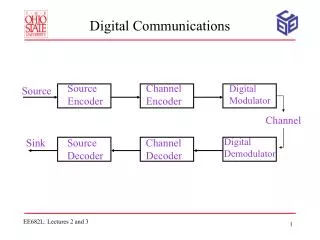
Random SignalsRandom Variables • All useful message signals appear random; that is, the receiver does not know, a priori, which of the possible waveform have been sent. • Let a random variable X(A) represent the functional relationship between a random event A and a real number. • Notation - Capital letters, usually X or Y, are used to denote random variables. Corresponding lower case letters, x or y, are used to denote particular values of the random variables X or Y. • Example: means the probability that the random variable X will take a value less than or equal to 3.
Probability Mass Function for (discrete RVs) • Probability Mass Function (p(x)) specifies the probability of each outcome (x) and has the properties:
Cumulative Distribution Function • Cumulative Distribution Function specifies the probability that the random variable will assume a value less than or equal to a certain variable (x). • The cumulative distribution, F(x), of a discrete random variable X with probability mass distribution, p(x), is given by:
Mean & Standard Deviation of a Discrete Random Variable X • Mean or Expected Value • Standard Deviation
Example The probability mass function of X is Xp(x) 0 0.001 1 0.027 2 0.243 3 0.729 The cumulative distribution function of X is XF(x) 0 0.001 1 0.028 2 0.271 3 1.000
Example Contd. Probability Mass Function p(x) 1 0.5 0 x 0 1 2 3 4 Cumulative Distribution Function F(x) 1 0.5 0 x 0 1 2 3 4
Probability Density Function The function f(x) is a probability density function for the continuous random variable X, defined over the set of real numbers R, if 1. f(x) 0 for all x R. 2. 3. P(a < X < b) =
Probability Density Function Note: For any specific value of x, say x = c, f(x) can be thought of as a smoothed relative frequency histogram
Cumulative Distribution Function The cumulative distribution function F(x) of a continuous random variable X with density function f(x) is given by:
Probability Density Distribution: f(t) f(t1) = value of f, not a probability Area = P(t1 < T <t2) t F(t) 1 F(t2) P(t1 < T <t2) = F(t2) - F(t1) F(t1) t t1 t2 Note: F(t) is the cumulative area under f(t)
Ensemble Averages • The first moment of a probability distribution of a random variable X is called mean value mX, or expected value of a random variable X • The second moment of a probability distribution is the mean-square value of X • Central momentsare the moments of the difference between X and mX and the second central moment is the variance of X • Variance is equal to the difference between the mean-square value and the square of the mean
Special Continuous Probability Distributions • Uniform Distribution • Normal Distribution • Lognormal Distribution • Exponential Distribution • Weibull Distribution
Uniform Distribution Probability Density Function f(x) 1/(b-a) 0 x a b
Uniform Distribution Probability Distribution Function F(x) 1 0 x a b
Uniform Distribution: Mean & Standard Deviation • Mean • Standard Deviation
Random Processes • A random process X(A, t) can be viewed as a function of two variables: an event A and time.
Statistical Averages of a Random Process • A random process whose distribution functions are continuous can be described statistically with a probability density function (pdf). • A partial description consisting of the mean and autocorrelation function are often adequate for the needs of communication systems. • Mean of the random process X(t) : (1.30) • Autocorrelation function of the random process X(t) (1.31)
Stationarity • A random process X(t) is said to be stationary in the strict sense if none of its statistics are affected by a shift in the time origin. • A random process is said to be wide-sense stationary (WSS) if two of its statistics, its mean and autocorrelation function, do not vary with a shift in the time origin. (1.32) (1.33)
Autocorrelation of a Wide-Sense Stationary Random Process • For a wide-sense stationary process, the autocorrelation function is only a function of the time difference τ = t1 – t2; (1.34) • Properties of the autocorrelation function of a real-valued wide-sense stationary process are Symmetrical in τ about zero Maximum value occurs at the origin Autocorrelation and power spectral density form a Fourier transform pair Value at the origin is equal to the average power of the signal
Time Averaging and Ergodicity • When a random process belongs to a special class, known as an ergodic process, its time averages equal its ensemble averages. • The statistical properties of such processes can be determined by time averaging over a single sample function of the process. • A random process is ergodic in the mean if (1.35) • It is ergodic in the autocorrelation function if (1.36)
Power Spectral Density and Autocorrelation • A random process X(t) can generally be classified as a power signal having a power spectral density (PSD) GX(f ) • Principal features of PSD functions And is always real valued for X(t) real-valued PSD and autocorrelation form a Fourier transform pair Relationship between average normalized power and PSD
Summary of Relationships of Ergodicity of Random Process to interchange the Time and Ensemble Averages
Noise in Communication Systems • The term noise refers to unwanted electrical signals that are always present in electrical systems; e.g spark-plug ignition noise, switching transients, and other radiating electromagnetic signals. • Can describe thermal noise as a zero-mean Gaussian random process. • A Gaussian process n(t) is a random function whose amplitudeat any arbitrary time t is statistically characterized by the Gaussian probability density function (1.40) where, is the variance of n. • The normalized or standardized Gaussian density function of a zero-mean process is obtained by assuming that =1.
Noise in Communication Systems • The normalized or standardized Gaussian density function of a zero-mean process is obtained by assuming unit variance.
Noise in Communication Systems • A random signal is often represented as the sum of a Gaussian noise random variable and a dc signal. That is z = a + n where z is the random signal, a is the dc component, and n is the Gaussian noise random variable. • The pdf p(z) is then expressed as where, is the variance of n. • The Gaussian distribution is often used as the system noise model because of a theorem, called the central limit theorem
White Noise • The primary spectral characteristic of thermal noise is that its power spectral density is the same for all frequencies of interest in most communication systems • A thermal noise source emanates an equal amount of noise power per unit bandwidth at all frequencies– from dc to about 1012 Hz. • Therefore, a simple model for thermal noise assumes that its power spectral density Gn(f) is flat for all frequencies, as shown below
White Noise • Power spectral density of noise, Gn(f ) is (1.42) where the factor 2 is included to indicate that Gn(f ) is a two-sided power spectral density. • When the noise power has such a uniform spectral density we refer to it as white noise (white light which contains equal amounts of all frequencies within the visible band of electromagnetic radiation) • The autocorrelation function of white noise is given by the inverse Fourier transform of the noise power spectral density, denoted as follows: (1.43)
White Noise • Thus the autocorrelation of white noise is a delta function weighted by the factor N0/2 and occurring at =0, as shown in figure below: • Note that Rn() is zero for 0; • The average power Pn of white noise is infinite because its bandwidth is infinite, as shown in below:
White Noise • The effect on the detection process of a channel with additive white Gaussian noise (AWGN) is that the noise affects each transmitted symbol independently. • Such a channel is called a memoryless channel. • The term “additive” means that the noise is simply superimposed or added to the signal
Signal Transmission through Linear Systems • A system can be characterized equally well in the time domain or the frequency domain, techniques will be developed in both domains • The system is assumed to be linear and time invariant. • It is also assumed that there is no stored energy in the system at the time the input is applied
Impulse Response • The linear time invariant system or network is characterized in the time domain by an impulse response h (t ), to an input unit impulse (t) (1.45) • The response of the network to an arbitrary input signal x (t ) is found by the convolution of x(t ) with h (t ) (1.46) • The system is assumed to be causal, which means that there can be no output prior to the time, t =0,when the input is applied. • The convolution integral can be expressed as: (1.47a)
Frequency Transfer Function • The frequency-domain output signal Y(f ) is obtained by taking the Fourier transform (1.48) • Frequency transfer function or the frequency response is defined as: (1.49) (1.50) • The phase response is defined as: (1.51)
Random Processes and Linear Systems • If a random process forms the input to a time-invariant linear system, the output will also be a random process. • The input power spectral density GX(f )and the output power spectral density GY(f )are related as: (1.53)
DistortionlessTransmissionWhat is the required behavior of an ideal transmission line? • The output signal from an ideal transmission line may have some time delay and different amplitude than the input • It must have no distortion—it must have the same shape as the input. • For ideal distortionless transmission: Output signal in time domain Output signal in frequency domain System Transfer Function (1.54) (1.55) (1.56)
What is the required behavior of an ideal transmission line? • The overall system response must have a constant magnitude response • The phase shift must be linear with frequency • All of the signal’s frequency components must also arrive with identical time delay in order to add up correctly • Time delay t0 is related to the phase shift and the radian frequency = 2f by: t0 (seconds) = (radians) / 2f (radians/seconds ) (1.57a) • Another characteristic often used to measure delay distortion of a signal is called envelope delay or group delay: (1.57b)
Ideal Filters • For the ideal low-pass filter transfer function with bandwidth Wf= fuhertz can be written as: (1.58) Where (1.59) (1.60) Figure1.11 (b) Ideal low-pass filter
Ideal Filters • The impulse response of the ideal low-pass filter:
Ideal Filters • For the ideal band-pass filter transfer function • For the ideal high-pass filter transfer function Figure1.11 (c) Ideal high-pass filter Figure1.11 (a) Ideal band-pass filter
Realizable Filters • The simplest example of a realizable low-pass filter; an RC filter 1.63) Figure 1.13
Realizable Filters • Phase characteristic of RC filter Figure 1.13
Realizable Filters • There are several useful approximations to the ideal low-pass filter characteristic and one of these is the Butterworth filter • (1.65) • Butterworth filters are popular because they are the best approximation to the ideal, in the sense of maximal flatness in the filter passband.
Bandwidth Of Digital DataBaseband versus Bandpass • An easy way to translate the spectrum of a low-pass or baseband signal x(t) to a higher frequency is to multiply or heterodyne the baseband signal with a carrier wave cos 2fct • xc(t) is called a double-sideband (DSB) modulated signal xc(t) = x(t) cos 2fct (1.70) • From the frequency shifting theorem Xc(f) = 1/2 [X(f-fc) + X(f+fc) ](1.71) • Generally the carrier wave frequency is much higher than the bandwidth of the baseband signal fc >> fmand therefore WDSB = 2fm
Bandwidth Dilemma • Theorems of communication and information theory are based on the assumption of strictly bandlimited channels • The mathematical description of a real signal does not permit the signal to be strictly duration limited and strictly bandlimited.
Bandwidth Dilemma • All bandwidth criteria have in common the attempt to specify a measure of the width, W, of a nonnegative real-valued spectral density defined for all frequencies f < ∞ • The single-sided power spectral density for a single heterodyned pulse xc(t) takes the analytical form: (1.73)
(a) Half-power bandwidth. (b) Equivalent rectangular or noise equivalent bandwidth. (c) Null-to-null bandwidth. (d) Fractional power containment bandwidth. (e) Bounded power spectral density. (f) Absolute bandwidth. Different Bandwidth Criteria