Chapter 9. Vector Space
Chapter 9. Vector Space. Professor : Jorge M. Seminario Date – Nov. 14 th , 2011 Group 3 - Pratik Darvekar Brian Zachary Harding Min-Chi Hsieh. 9.1 Introduction.

Chapter 9. Vector Space
E N D
Presentation Transcript
Chapter 9. Vector Space Professor : Jorge M. Seminario Date – Nov. 14th, 2011 Group 3 - Pratik Darvekar Brian Zachary Harding Min-Chi Hsieh
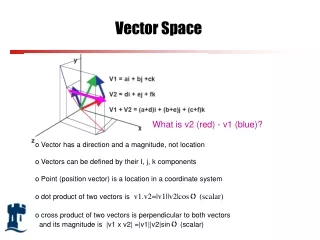
9.1 Introduction • A vector is a quantity which has both amagnitudeand a direction. Vectors arise naturally as physical quantities. • Examples of vectors are displacement, velocity, acceleration, force and electric field. Some physical quantities cannot be added in the simple way described for scalars. [1]http://www.physchem.co.za/index.htm
9.1 Introduction • ex: Walk 4m in a northerly direction and then 3m in an easterly direction, how far would you be from your starting point? • The answer is clearly NOT 7 m! One could calculate the distance using the theorem of Pythagoras, • You could have reached the same final position by walking 5 m in the direction 36.9° east of north. • These quantities are called displacements. Displacement is an example of a vector quantity. [1]http://www.physchem.co.za/index.htm
9.2 Vectors; Geometrical Representation 9.2.1 Algebra of Vectors • F + G = G + F • (F + G) + H = F + (G + H) • F + 0 = F • α(F + G) = αF + αG • (αβ)F = α(βF) • (α + β)F = αF + βF G F F + G F G [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.1, pp. 204-208.
9.2 Vectors; Geometrical Representation 9.2.2 Norm of a vector • The norm, or magnitude, of a vector (a, b, c) is the number defined by ex : = (-1, 4, 1) = Z P (-1, 4 ,1) Y O [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.1, pp. 201-203. X
9.3 Introduction of Angle and Dot Product 9.3.1 Dot Product • Let F = a1i + b1j + c1k , G = a2i + b2j + c2k F· G = a1a2 + b1b2 + c1c2 = cosθ G θ F Gcosθ [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.2, pp. 209.
9.3 Introduction of Angle and Dot Product 9.3.2 Properties of Dot product • F· G = G· F • (F + G)· H = F· H + G· H • α(F· G ) = (αF)· G = F· (αG) • F· F = • F· F = 0 if and only if F = 0 [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.2, pp. 210-211.
9.3 Introduction of Angle and Dot Product 9.3.3 Orthogonal Vectors • Vector F and G are orthogonal if and only if F· G = 0 ex: F = -4i + j + 2k, G = 2i + 4k, H = 6i – j – 2k F· G = (-4)(2) + (1)(0) + (2)(4) = 0 F· H = (-4)(6) + (1)(-1) + (2)(-2) = -29 ≠ 0 G· H = (2)(6) + (0)(-1) + (4)(-2) = 4 ≠ 0 only F & G are orthogonal, others are not! [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.2, pp. 213-215.
9.3 Introduction of Angle and Dot Product Application for finding plant equation ex: Suppose we want the equation of a plant Π containing the point (-6, 1, 1) and perpendicular to the vector N = -2i + 4j + k First we suggest a point (x, y, z) is on Π, so the vector from (-6, 1, 1) to (x, y, z) must be orthogonal to N. this means that ((x+6)i + (y-1)j + (z-1)k)· N = 0 ((x+6)i + (y-1)j + (z-1)k)· (-2i + 4j + k) = 0 -2(x+6) + 4(y-1) + (z-1) = 0 -2x + 4y + z = 17 Z (-6, 1, 1) (x, y, z) N [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.2, pp. 213-215. Y X
9.4&9.6 n-Space& Generalized Vector Space • If n is a positive integer, an n-vector is an n-tuple (x1, x2,…, xn), with each coordinate xj a real number. The set of all n-vector is denoted Rn. 9.4.1 Algebra of Vectors - same as before • F + G = G + F • (F + G) + H = F + (G + H) • F + 0 = F • α(F + G) = αF + αG • (αβ)F = α(βF) • (α + β)F = αF + βF [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.4, pp. 222-223.
9.5 Dot Produce, Norm and Angle for n-Space 9.5.1 Definition - Norm The Norm of F = (x1, x2,…,xn) 9.5.2 Definition - Dot Product We let F = (x1, x2,…,xn), G = (y1, y2,…,yn), we can get F· G = x1y1 + x2y2 + … + xnyn [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.4, pp. 222-223.
9.5 Dot Produce, Norm and Angle for n-Space 9.5.3 Properties of Dot product - same as before • F· G = G· F • (F + G)· H = F· H + G· H • α(F· G ) = (αF)· G = F· (αG) • F· F = • F· F = 0 if and only if F = 0 [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.4, pp. 222-223.
9.5 Dot Produce, Norm and Angle for n-Space 9.5.4 Cauchy-Schwarz Inequality Let F and G be vectors, then Proof: from dot product we know cosθ = since so then equivalent to the Cauchy-Schwarz inequality! [1]Peter V. O’Neil, “Vectors and Vector Spaces” in Advanced Engineering Mathematics 5th edition. Birmingham, AL: B. Stenquist, 2003, ch.5.4, pp. 224.
9.7 Span and Subspace 9.7.1 Definition If you have a vector or a group of vectors, the set of all linear combinations of these vectors is called the span. Symbolically this is written as: where α1,… αk are scalars [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 439-441. Print.
9.7 Span and Subspace 9.7.2 Single Vector • When this definition is applied to a single vector, the span is a line extending infinitely from the vector • ex: The span of the vector u1=(4,7) is the set of all scalar multiples of (4,7). 2u1=(8,14) 0u1=(0,0) -5u1=(-20,-35) [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 439-441. Print.
9.7 Span and Subspace 9.7.3 Two Vectors • Similar to the span of a single vector, the span of two vectors is all linear combinations of both vectors. ex: u1=(4,7), u2=(8,14). The span of these two vectors is the same as the span of just u1because u2 is a scalar multiple of u1. [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 439-441. Print.
9.7 Span and Subspace 9.7.4 Subspace • Up to this point, all of the vectors have been in R2. That is to say that the spans of all of the vectors have been subspaces of R2. • The governing definition of subspace is: If a subset T of a vector space S is itself a vector space, then T is a subspace of S. • Using this definition a subspace is either all or part of a vector space, meaning R2 is a subspace of R2. [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 439-441. Print.
9.7 Span and Subspace ex : If the span of u1=(2,3) u2=(2,4) all or part of R2. To determine the span of (u1, u2) let v=(v1, v2) be any vector in R2 and try to express v=(α1u1+α2u2) (v1, v2)=α1(2,3)+α2(2,4) v1=2α1+2α2 v2=3α1+4α2 Now, use Gauss elimination: α1= 2v1-v2 This system is consistent, meaning that you can solve α1 for every v
9.7 Span and Subspace ex : In R3 do a similar exercise u1 = (2, 1, 2), u2 = (-2, 1, 1) and v = (α1u1+α2u2) Gauss elimination: 2α1-2α2=v1 α1+α2=v2 2α1+α2=v3 0=v3-(1/4)v1-(3/2) v2 This means that the span is constrained by this equation. Any two can be chosen arbitrarily and the last is set. The solution is a plane and is not all of R3, rather it is a subspace
9.8: Linear Dependence 9.8.1 Governing definition • A finite set of vectors is LI if and only if there exist scalar multipliers such that 0=α1u1+α2u2…αjuj is only true if all scalar multipliers are zero Independent Dependent [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 444-446. Print.
9.8: Linear Dependence ex : Consider the 2-tuples, u1=(2, 1), u2=(-2, 1) Now, 2α1-2α2=0α1+α2=0 Gauss elimination gives: α1-α2=0 α1=0 This gives only the trivial solution α1=α2=0 This fits the governing definition so both of these are LI
9.8: Linear Dependence 9.8.2 Some important theorems concerning linear independence • If a set of 2 vector is LD, then one vector must be a scalar multiple of the other • Every finite set of orthogonal vectors is LI • A set containing the zero vector is LD [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch. 9.7 pp. 446. Print.
9.8: Linear Dependence ex: u1=(2, 1, 2), u2=(1, -1, 0) and u3=(-2, -1, 1) 2α1+α2-2α3=0 α1-α2-α3=02α1+α3=0 Gauss elimination gives: 2α1+α2-2α3=0 -3α2=0 3α3=0 All α are equal to 0, so the set is LI Independent Dependent
9.9 Bases, Expansions, Dimension 9.9.1 Definition : Basis The finite set of vectors {e1,e2,…,ek} in a vector space S is a basis for S if each vector u in S can be can be expressed uniquely in the form- u=1e1+…+ek= [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.9 pp. 470-484. Print.
9.9 Bases, Expansions, Dimension 9.9.2 Test for basis The finite set {e1,e2,…,ek} in a vector space S is a basis for S if and only if it spans S and is Linearly Independent. [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.9 pp. 470-484. Print.
9.9 Bases, Expansions, Dimension ex : Show whether the vectors (3, 2) and (-1, -5) is a basis for R2 (3, 2) and (-1, -5) is a basis for R2 if α1 (3, 2)+(-1, -5) = (u1,u2) admits a unique solution for α1, α2 for any values of u1,u2. 3 α1 – α2= u1 2 α1 - 5α2= u2, solving we get,α1 = α2 = Thus we get unique α1 , α2 for every u1,u2. So it’s a basis for R2
9.9 Bases, Expansions, Dimension 9.9.3 Definition: dimension If the greatest number of LI vectors that can be found in a vector space S is k, where 1≤k≤∞, then S is k-dimensional. dim S = k • If a vector space S admits a basis consisting of k vectors, then S is k-dimensional. [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.9 pp. 470-484. Print.
9.9 Bases, Expansions, Dimension 9.9.4 Orthogonal bases • For non-orthogonal bases, the expansion process of a given vector can be quite laborious. For example, if we seek to expand a given vector u in R8(8 dimensional space), then there will be 8 base vectors() and 8 expansion coefficients(), and these will be found by solving a system of 8 equations in 8 unknowns(). [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.9 pp. 470-484. Print.
9.9 Bases, Expansions, Dimension 9.9.4 Orthogonal bases • Hence orthogonal bases are preferred, in which- . = 0 if i≠j. if {e1,e2,…,ek} are orthogonal bases, the expansion of any vector u is simply- u = 1+…+ k . [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.9 pp. 470-484. Print.
9.9 Bases, Expansions, Dimension ex : Expand u = (4, 3, -3, 6) in terms of the orthogonal base vectors e1=(1, 0, 2, 0), e2=(0, 1, 0, 0), e3=(-2, 0, 1, -1) and e4=(-2, 0, 1, -1) of R4. Compute = -2, = 5, and so on, u = 1+…+ 4 , u = e1 + 3 e2 + e3 + e4
9.10 Best approximation • If the vectors {e1,e2,…,en } are orthonormal, but fall short of being a basis for S (i.e., N < dim S), and we still wish to expand a vector u in S which does not fall within the span {e1,e2,…,en }, in such a case the best approximation of u in terms of {e1,e2,…,en } is given by- u = [1]Greenberg, Michael D. "Vector Space: Span and Subspace." Advanced Engineering Mathematics 2nd Edition. Upper Saddle River, NJ: Prentice-Hall, 1998. ch.9.10 pp. 470-484. Print.
9.10 Best approximation ex : Let S be R2, N=1, e1= (12,5), and u= (1,1). Find the best approximation uc1e1. The best approximation of u in terms of {e1,e2,…,en } is given by u = 1= + = Hence u = e1