Download

1 / 3
30 likes | 116 Views
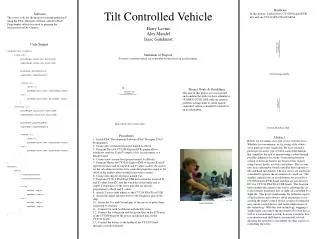
The project aims to create a buoyancy-controlled pollution tracking vehicle to monitor Combined Sewage Overflow plumes in Lake Michigan from Milwaukee's sewer system. Collaboration between UWM's School of Freshwater Sciences and Metro Milwaukee Sewer District to develop a vehicle with drag force, sensors, and buoyancy control. Using Archimedes' Principle to control buoyancy, drag force for mobility, and sensors for CSO plume detection. Plan includes proof of concept, prototyping, and final vehicle development with smaller size, pistons, PID control loops, and additional sensors. Goal is to deploy a field model in Lake Michigan.

E N D
Buoyancy Controlled Pollution Tracking Vehicle Goal: Track Combined Sewage Overflow (CSO) plumes of pollution dumped into Lake Michigan from Milwaukee’s sewer system. Combined Sewage Overflow Plume from Milwaukee Harbor Project: Create a vehicle with the ability to track these plumes via external drag force, sensors, and control over its buoyancy. A Collaboration between the UWM’s School of Freshwater Sciences and Metro Milwaukee Sewer District
What’s the Plan? • Use Archimedes’ Principle to control buoyancyDrag Force for lateral mobilityDepth From Pressure Readingsg • Proof of Concept • Prototyping
What’s Left to be Done? • Final Vehicle -Significantly Smaller -Pistons -PID Control loops • Additional Sensors-Finding sensors that will best detect CSO Plumes. • Combining the two fora field model to be deployed in Lake Michigan.