Download
1 / 14
140 likes | 275 Views
Sune Fallgaard Nielsen Informatics and Mathematical Modelling Technical University of Denmark Richard Petersens Plads, Building 322 DK2800 Lyngby, Denmark. Path-Based Scheduling. Overview. Motivation Introduction – Prior work / new paradigm Defining problem and model constraints

E N D
Sune Fallgaard Nielsen Informatics and Mathematical Modelling Technical University of Denmark Richard Petersens Plads, Building 322 DK2800 Lyngby, Denmark Path-Based Scheduling
Overview • Motivation • Introduction – Prior work / new paradigm • Defining problem and model constraints • Solution: • AFAP Scheduling • Algorithm • The scheduling steps using AFAP • Results • Conclussion [M-1] High Level Synthesis
Motivation Derive a synthesis tool which: • Minimizes the number of control steps • Takes constraints into account • Considers loops and conditional branches ( which no prior work has done ) [M-1] High Level Synthesis
Introduction • Prior work: scheduling <- minimize cost function • Cost function: - Fixed hardware (uP): Number of states - Hardware syntheses: Number of states + hardware • Scheduling: Minimizing the cost function by moving operations around • Optimal solution: - Optimal schedule emphasizing concurrency - Force directed serialization + moving mobile operations [M-1] High Level Synthesis
Introduction / Problem • Path-Based Scheduling for Synthesis: • Forget cost functions! • Instead: Emphasize on conditional branches, loops • Minimize number of control steps - taking constraints into account ( main problem ) • Main problem: Gain advantages from looking at branches [M-1] High Level Synthesis
Constraints • Internal constraints: • Units can only receive and output values once per cycle • With single phase clock this implies single use per cycle • External constraints: • Amount of hardware available: • Area, units etc. • Timing constraints [M-1] High Level Synthesis
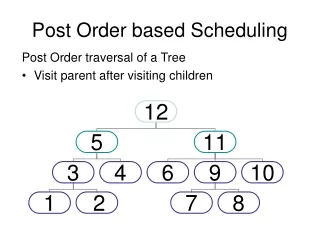
AFAP scheduling AFAP ( As Fast As Possible ) Basic idea: • Control-flow directed graph- Nodes (ops.). Edges (precedence relations). • Longest path: Max number of operations. Cycles only traversed once (%loop unfolding) • Scheduling: Put as many operations into one control step as possible in all possible paths. Goal: Finite State Machine to implement control [M-1] High Level Synthesis
AFAP Scheduling for a single path AFAP Sch. for a single path ( no loops/branches ) • Longest path is computed • For every path constraints are computed (variables, IOs, func. Units, max delay) and “Cut”s are lain in according to constraints • Interval graph is formed with cliques (complete subgraph of all poss. edges) • Cuts an cliques are stored for later processing [M-1] High Level Synthesis
AFAP Scheduling for a single path [M-1] High Level Synthesis
AFAP – The algorithm The four steps to Nirvana ( or something ): • Transform the control flow graph into a directed acyclic graph (DAG) • All paths in the DAG are scheduled AFAP • Schedules are overlapped in a way to minimize the number of control steps • The finite state machine is built. [M-1] High Level Synthesis
AFAP – Example [M-1] High Level Synthesis
Building finite state machine Trivial finite state machine design: • Overlapping of intervals to form states (same cut -> same state) • Construct state transitions (figure out control signals for each state) • Construct state transition conditions (rules for looping, waiting etc) [M-1] High Level Synthesis
Results • Comparison is difficult since goals are different. • Different compiler machines used [M-1] High Level Synthesis
Conclusion: Good things / bad things Good things: Real life examples Good results Bad things: No support for secondary hardware constraints - like busses, registers, ports etc. No smart loop unfolding capabilities No pipeline scheduling capabilities No instruction execution reordering supported [M-1] High Level Synthesis