Download

1 / 17
170 likes | 195 Views
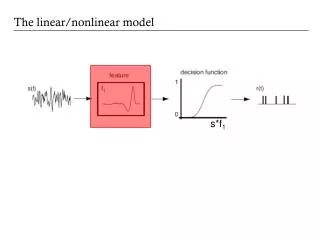
This research paper discusses the stabilization of severe slugging in pipeline systems using a low-dimensional nonlinear model. The paper presents a control analysis, controller configurations and design, and summarizes the findings. It also explores previous work on the topic and provides a simple and physically motivated model for control purposes. The paper concludes that stabilization using upstream pressure is simple, while using downstream measurements is possible but more difficult.

E N D
Stabilization of severe slugging based on a low-dimensional nonlinear model Presented at AIChE Annual Meeting in Indianapolis, USA November 7th, 2002 Espen Storkaas and Sigurd Skogestad Dep. of Chemical Engineering Norwegian University of Science and Technology www.chemeng.ntnu.no/~espensto/
Outline • Introduction / Problem Description • ModelDescription • Case • Controllability analysis • Controller configurations and design • Summary and conclusion www.chemeng.ntnu.no/~espensto/
Slug cycle 1 2 • Liquid blocking • Slug growth/pressure buildup • Liquid Production • Gas production/Liquid fallback 4 3 www.chemeng.ntnu.no/~espensto/
Slug cycle (2) Experiments performed by the Multiphase Laboratory, NTNU www.chemeng.ntnu.no/~espensto/
Objectives • Avoid slug behavior (open loop stable) • Obtain stationary behavior (open loop unstable) • Issues • Impossible/existence? • Modeling • Control • Previous Work • Hedne & Linga (1990) • Henriot et al. (1999) • Havre et al. (2000) www.chemeng.ntnu.no/~espensto/
Modeling basis • Three states • Continuous • Description of both slug- and ”stationary” flow regime www.chemeng.ntnu.no/~espensto/
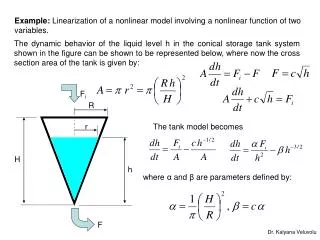
Model • Upstream gas volume (1 state) • Holdup gas • Constant volume • Ideal gas law • No liquid dynamics • Riser (2 states) • Holdup of liquid and gas • Stationary pressure balance • Pressure-flow relationship for gas • Entrainment of liquid • Choke valve • Simplified gas valve www.chemeng.ntnu.no/~espensto/
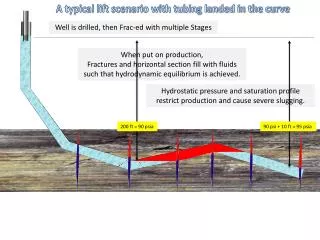
Case • Test case for slug-flow in OLGA • Constant feed • Valve closing time : 1min • Downstream pressure: 50Bar www.chemeng.ntnu.no/~espensto/
Model tuning • Based on bifurcation chart from OLGA simulations • Tuning based on Hopf point (purely imaginary poles) • Amplitude/frequency • Focus on stabilizable area Stable slug Unstable stationary www.chemeng.ntnu.no/~espensto/
Poles and Zeros • Unstable (RHP) poles need feedback for stabilization • Imposes lower limit on bandwidth • RHP zeros limit performance • Imposes upper limit on bandwidth • RHP poles combined with RHP zeros may render stabilizing control impossible if the zero is close to the pole www.chemeng.ntnu.no/~espensto/
FT ρT DP P1 Poles and zeros Operation points: Zeros: www.chemeng.ntnu.no/~espensto/
ref PC PT Stabilization using P1 • Easy • Gain K = 0.5 Bar-1 • Integral time τI=500s • MS = 1.02, MT = 1.04 • Bandwidth = 0.15 s-1 www.chemeng.ntnu.no/~espensto/
Stabilization using P1 (2) www.chemeng.ntnu.no/~espensto/
z ref ZC FC ZT FT Stabilization using downstream measurements (1) • Difficult • Stabilizing controller: Volumetric flow in slave controller • K = 8 s/m3, τI = 40 s • Cascade: Valve position reset • K = 0.01 m3/s, τI = 750 s • MS = 1.37, MT = 1.47 • Bandwidth (outer loop) = 0.001 s-1 www.chemeng.ntnu.no/~espensto/
Stabilization using downstream measurements (2) www.chemeng.ntnu.no/~espensto/
Summary and conclusions • Stabilization of desired flow regime • Simple, physically motivated model for control purposes • Useful for measurement selection • Choice of control configuration • Stabilization using upstream pressure simple • Stabilization using downstream measurements possible www.chemeng.ntnu.no/~espensto/
Acknowledgements • Norwegian Research Council for financial support • ABB and Statoil for supervision and collaboration References Havre, K., Stornes, K. and Stray, H. Taming Slug Flow in pipelines, ABB Review 4 (2000), p.55-63. Hedne, P. And Linga, H. Suppression of terrain slugging with automatic and manual riser choking, riser choking, Advances in Gas-Liquid Flows (1990), p.453-469 Henriot, V., Courbot, A., Heintze, E. And Moyeux, L. Simulation of process to control severe slugging: Application to Dunbar pipeline, SPE Annual Conference and Exhibition, Huston, Texas(1999). SPE56461 www.chemeng.ntnu.no/~espensto/