Download
1 / 49
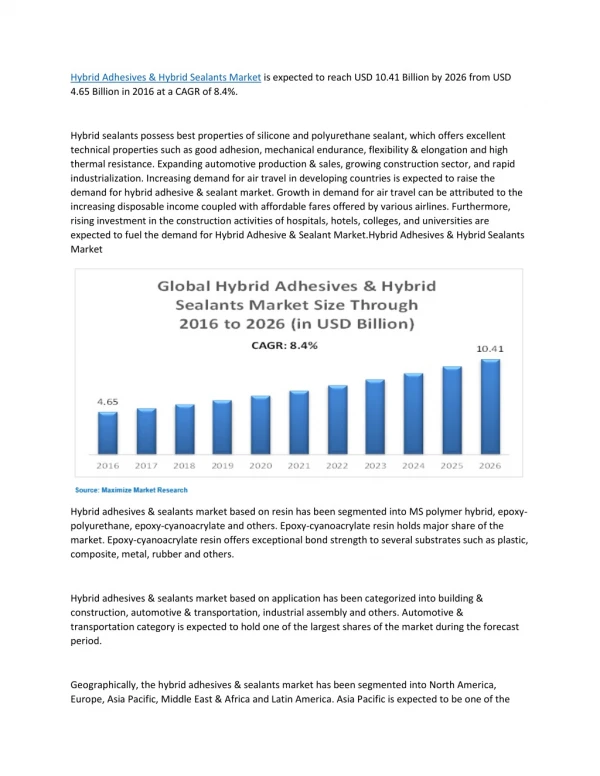
490 likes | 521 Views
Univ. of Maryland-College Park, Dept. of Atmos. & Oceanic Science. Hybrid Methods. JCSDA Summer Colloquium on Data Assimilation Fort Collins, CO 27 July – 7 August 2015. Daryl Kleist.

E N D
Univ. of Maryland-College Park, Dept. of Atmos. & Oceanic Science Hybrid Methods JCSDA Summer Colloquium on Data Assimilation Fort Collins, CO 27 July – 7 August 2015 Daryl Kleist Thanks to Kayo Ide (UMD), Jeff Whitaker (NOAA/ESRL), David Parrish (NOAA/NCEP), Steve Penny (UMD), and Matt Kretschmer (UMD) for inspiration, collaboration, and several slides.
Outline • Motivation for Hybrid • Covariance Hybrid and EnVar Formulation • Single Observations • Toy Model Results • Extension to 4D • Real World Application and Examples from NCEP GFS • Hybrid Alternatives • Gain-Hybrid • Ensemble-Based Hybrid (CaLETKF) • Summary
Perspectives of Data Assimilation • Two main perspectives of practical data assimilation & hybrid approach • What are some of the pros/cons for the ML and MV approaches? • Variational Approach: • Least square estimation • [maximum likelihood] • Variational • Sequential (KF) Approach: • Minimum Variance estimate • [least uncertainty] • EnKF (or RRKF) p(x) p(x)
3DVar vs EnKFSingle Observation GSI Example xl position 3DVAR EnKF B determines the quality of Δxa Single 850mb Tv observation (1K O-F, 1K error)
Kalman Filter from Var Perspective • Recast the problem in terms of variational framework (cost function) • BKF: Time evolving background error covariance • AKF: Inverse Hessian of JKF(x’) Forecast Step E/En KF Analysis
Use of Be in Var • Or, substitute ensemble estimate of error covariance instead • This is in the full physical space, which we can work around by introducing a new control variable: • Where a is the local weight for the ensemble members • L is the localization on the extended control variable • xe are the ensemble perturbations that represent Be (as in EnKF)
Be and BcHybridization • We have already demonstrated that Be is powerful for providing flow-dependent estimates of the background error covariance (and multivariate correlations) • However, suffers from severe rank deficiency • Alternatively, Bc is full-rank (in the space of the entire model state) • However, typically taken to be static in time, derived from climatological (and usually averaged in time) statistics • Does not often represent multivariate correlations well (i.e. linking humidity to wind) • So, why not try to combine them (Hamill and Snyder, 2000)
Single ObservationHamill and Snyder 100% Bc 90% Be ,10% Bc
Toy Model Demo (L96) 3DVAR Result, 50% obs • Left shows “NMC” derived Bc , Right is a snapshot of truth, background, analysis, and observations at cycle 500 for 3DVAR configuration • 3DVAR does well in observed regions, but struggles in unobserved do to Bc
Toy Model Demo (L96) ETKF Result, 50% obs,M=20 • Left shows snapshot of ETKF derived Be, Right is a snapshot of truth, background, analysis, and observations at cycle 500 for LETKF configuration • ETKF does well everywhere, time evolving B
Toy Model Demo (L96) Hybrid Result, 50% obs,M=20 • Left shows snapshot of Bh, Right is a snapshot of truth, background, analysis, and observations at cycle 500 for hybrid configuration • Hybrid does much better than 3DVAR, comparable to LETKF
Toy Model Demo (L96) Hybrid Result, 50% obs, M=20 • Hybrid (small beta) as good as ETKF • Hybrid (larger beta) in between 3DVAR and ETKF 3DVAR b = 0.3 b = 0.7 ETKF Analysis RMSE (x10) over 1800 cases • Small beta hybrid better than LETKF
Toy Model Demo (L96) Hybrid Result, 50% obs, M=10 • Hybrid can help mitigate small ensemble size (like localization) • Not shown: Hybrid with localization would be even better yet 3DVAR b = 0.3 b = 0.7 ETKF LETKF Analysis RMSE (x10) over 1800 cases
Hybrid EnVar • Starting from the EnVar cost function, how could we combine the static and ensemble components? • Solution: Add a second background term (one for ensemble, and one for static). Here, we’ll drop the k subscript to help differentiate between climatological (c) and ensemble (e) contributions
Hybrid EnVarLorenc (2003), Buehner (2005), Wang et al.(2007) bc & be: weighting coefficients for clim. (var) and ensemble covariance respectively xt’: (total increment) sum of increment from fixed/static B (xc’) and ensemble B ak: extended control variable; :ensemble perturbations - analogous to the weights in the LETKF formulation L: correlation matrix [effectively the localization of ensemble perturbations]
Preconditioning Sidebar For the double Conjugate Gradient (GSI default), inverses of B and L not need and the solution is pre-conditioned by full B. This formulation differs from the UKMO and Canadians, who use a square root formulation. Also, the weights can be applied to the increments themselves:
Single Temperature Observation 3DVAR EnVar Hybrid bf-1=0.5 bf-1=0.0 bf-1=0.5
Single Observation TC Example 3DVAR EnVar Hybrid Single 850mb zonal wind observation (3 m/s O-F, 1m/s error) in Hurricane Ike circulation
So what’s the catch? • Most configurations of hybrid DA systems require the development and maintenance of two DA systems • EnKF + Var • Still need to deal with localization and other sampling-related issues (though somewhat mitigated by use of full rank Bc) • Even more parameters to explore • Trade off between ensemble size, resolution, hybrid weights, etc.
NCEP operational 3D EnVar Hybrid • Cycling 80 member EnKF (T574 ~40km) provides an ensemble-based estimate of Jb term in 3DVar. • 3DVar with ensemble Jbupdates a T1534 (~13 km) control forecast. The EnKF analysis ensemble is re-centered around the high-res analysis. • A combination of multiplicative inflation and stochastic physics is used to represent missing sources of uncertainty in the EnKF ensemble.
Operational Configuration • Full B preconditioned double conjugate gradient minimization • Spectral filter for horizontal part of L, level-dependent decorrelation distances • Recursive filter used for vertical • 0.5 scale heights • Same localization used in Hybrid (L) and EnSRF • Applied using GC compact functions • TLNMC (Kleist et al. 2009) applied to total analysis increment* 22
Dual-Res Coupled Hybrid Var/EnKF Cycling Generate new ensemble perturbations given the latest set of observations and first-guess ensemble member 1 forecast member 1 analysis T574L64 EnKF member update member 2 forecast member 2 analysis recenter analysis ensemble member N analysis Ensemble contribution to background error covariance member N forecast Replace the EnKF ensemble mean analysis and inflate GSI Hybrid EnVar high res forecast high res analysis T1534L64 Previous Cycle Current Update Cycle
Hybrid Impact in Pre-implementation Tests Figure 01: Percent change in root mean square error from the experimental GFS minus the operational GFS for the period covering 01 February 2012 through 15 May 2012 in the northern hemisphere (green), southern hemisphere (blue), and tropics (red) for selected variables as a function of forecast lead time. The forecast variables include 1000 hPa geopotential height (a, b), 500 hPa geopotential eight (c, d), 200 hPa vector wind (e, f, h), and 850 vector wind (g). All verification is performed using self-analysis. The error bars represent the 95% confidence threshold for a significance test.
Hybrid Impact in Pre-implementation Tests Figure 02: Mean tropical cyclone track errors (nautical miles) covering the 2010 and 2011 hurricane seasons for the operational GFS (black) and experimental GFS including hybrid data assimilation (red) for the a) Atlantic basin, b) eastern Pacific basin, and c) western Pacific basin. The number of cases is specified by the blue numbers along the abscissa. Error bars indicate the 5th and 95th percentiles of a resampled block bootstrap distribution.
4D Ensemble Var (Liu et al, 2008)GSI - Hybrid 4D-EnVarWang and Lei (2014); Kleist and Ide (2015) The Hybrid EnVar cost function can be easily extended to 4D and include a static contribution (ignore preconditioning) Jo term divided into observation “bins” as in 4DVAR Where the 4D increment is prescribed through linear combinations of the 4D ensemble perturbations plus static contribution, i.e. it is not itself a model trajectory Here, static contribution is time invariant. C represents TLNMC balance operator. No TL/AD in Jo term (M and MT)
Ensemble-Var methods: nomenclatureLorenc (2013) • En-4DVar: Propagate ensemble Pbfrom one assimilation window to the next (updated using EnKF for example), replace static Pb with ensemble estimate of Pb at start of 4DVar window, Pbpropagated with tangent linear model within window. • 4D-EnVar: Pbat every time in the assimilation window comes from ensemble estimate (TLM no longer used). • As above, with hybrid in name: Pbis a linear combination of static and ensemble components. • 3D-EnVar: same as 4D ensemble Var, but Pbis assumed to be constant through the assimilation window (current NCEP implementation).
GSI – Hybrid En-4DVarWang and Lei (2014); Kleist and Ide (2015) The traditional 4DVar cost function can be manipulated to use an ensemble to help prescribe the error covariance at the beginning of the window Jo term divided into observation “bins” as in 4DVAR Here, the hybrid error covariance is applied at the beginning of the window, and the TL/AD propagate within observation window (M and MT) in Jo term
4DVAR 4D analysis increment is a trajectory of the PF model. Lorenc & Payne 2007
4D EnVar 4D analysis is a (localised) linear combination of nonlinear trajectories. It is not itself a trajectory. Courtesy: Andrew Lorenc
4D Hybrids In the alpha control variable method one uses the ensemble perturbations to estimate Pb only at the start of the 4DVar assimilation window: the evolution of Pb inside the window is due to the tangent linear dynamics (Pb(t) ≈ MPbMT) In 4D-EnVar Pb is sampled from ensemble trajectories throughout the assimilation window (nonlinear dynamics): from:D. Barker
Single Observation (-3h) Examplefor 4D Variants 4DVAR 4DEnVar H-4DVAR_AD bf-1=0.25 H-4DEnVar bf-1=0.25
Time Evolution of Increment Solution at beginning of window same to within round-off (because observation is taken at that time, and same weighting parameters used) Evolution of increment qualitatively similar between dynamic and ensemble specification t=-3h t=0h t=+3h H-4DEnVar H-4DVAR_AD
4D Hybrid Summary • 4D EnVar analysis is localized, linear combination of ensemble perturbations (similar to EnFK/LETKF) • Traditional 4DVar (and hybrid 4DVars) requires sequential (and repeated) runs of the TL/AD. Ensemble trajectories can be pre-computed in parallel (but stored: IO/memory) • Developing/maintaining TL/AD is demanding • Still unsolved issues: Is ensemble sampling of nonlinear dynamics better than TL evolution? Other ensemble-related issues in EnVar…
4D Hybrid at Major NWP Centers • Hybrid 4D EnVar • Implemented at CMC (Canada) • Replaced 4DVAR • To be implemented at NCEP (early 2016) • Hybrid En-4DVAR (Operational or in Testing) • UKMO • ECMWF* • Meteo-France* • US Navgem • JMA
(Planned) Implementation of 4D EnVarat NCEP • Hybrid 4D EnVar to become operational for GFS/GDAS by January 2016 (tentative) • Tests at low resolution helped design configuration (results not show, publication in prep) • Real time and retrospectives already underway, operational package quasi-frozen • Package Configuration • T1534 deterministic GFS with 80 member T574L46 ensemble with fully coupled (two-way) EnKFupdate (87.5% ensemble & 12.5% static), same localization as current operations • Incremental normal mode initialization (TLNMC) on total increment • Multiplicative inflation and stochastic physics for EnKF perturbations • Full field digital filter • All-sky radiance assimilation, aircraft temperature bias correction • Minor model changes
Full Resolution (T1534/T574) Trials:500 hPa AC 500 hPa AC for the Operational GFS (Black, 3D Hybrid) and Test 4D configuration (Red) for the period covering 02-01-2015 through 04-29-2015.
Full Resolution (T1534/T574) Trials:Summary Scorecard (02-01 through 04-29 2015)
Note on Hybrid at ECMWF and Meteo-France • ECMWF and Meteo-France utilized ensembles of data assimilation to estimate background errors • They do not employ the extended control variable methods, but instead look to prescribe aspects of the B from the flow-dependent ensemble • This includes significant efforts on filtering of raw statistics since they use a 25 member ensemble (next slide). • Filtered Variances Used since 2012 • Filtered Correlations (in their wavelet Jb) used since 2013
ECMWF EDA Raw EDA StDev Vorticity 500 hPa Course 2014-EDA Filtered EDA StDev Vorticity 500 hPa c From Bonavita
Flow dependent Jb:Correlations Lengths of vorticity errors, ~500mb Online Wavelet Jb: 2012011000 Static Wavelet Jb Courtesy ECMWF
Alternate Implementation:“Gain Hybrid” Ensemble • Combining in a specific way to arrive at: Climo/Static • Which is the basis for the Hybrid-LETKF of Penny (2013) LETKF 3DVAR HYBRID
L96 ResultsOb Count v Ens Size LETKF HYBRID (0.2) • Hybrid really helps for small ensembles, comparable in skill (slightly worse) for regimes that are well observed and have very large ensemble sizes From Penny (2014)
Hybrid Gain Testing at ECMWF EnKF 4DVar Hybrid NHem Trop SHem
Ensemble-Based HybridsKretschmer et al. (2015) • Climatologically Augmented LETKF (caLETKF) • Supplement dynamic ensemble with orthogonal eigenvectors derived from Bc (i.e. they do not require model integration!)
Summary • Hybrid methods attempt to combine the best aspects of variational and ensemble based DA solvers • They have shown to be robust for small ensemble sizes and in the presence of model error • One draw back is that it requires the maintenance of two DA schemes • There has been some work on “filter-free” or more cost effective alternatives • EnVar schemes have a 4D extension that does not require the TL/AD • Though, while competitive, it has yet to be shown that hybrid 4D EnVar can truly be better than hybrid En-4DVAR (yet). • There are alternate hybrid formulations out there such as the hybrid gain and caLETKF
Summary (cont.) • Hybrid methods have become a popular scheme for NWP, and are now being extended to other earth system models • How will they fare for coupled DA schemes? • These methods are still fairly “new”, and there is still a lot of work that can be done to improve them • Estimation of weighting parameters/localization, building solvers that can update the ensemble and mean simultaneously, etc.
Sampling of References • Buehner, M., 2005: Ensemble-derived stationary and flow-dependent background-error covariances: Evaluation in a quasi-operational setting. Quart. J. Roy. Meteor. Soc., 131, 1013-1043. • Buehner, M., J. Morneau, and C. Charette, 2013: Four-dimensional ensemble-variational data assimilation for global deterministic weather prediction. Nonlin. Processes Geophys.,20, 669-682, doi:10.5194/npg-20-669-2013, 2013. • Clayton A. M, A. C. Lorenc and D. M. Barker, 2013: Operational implementation of a hybrid ensemble/4D-Var global data assimilation system at the Met Office. Quart. J. Roy. Meteor. Soc., 139, 1445-1461. • Hamill, T. H., and C. Snyder., 2000. A Hybrid Ensemble Kalman Filter-3D Variational Analysis Scheme. Mon. Wea. Rev. 128, 2905–2919. • Kleist, D. T., and K. Ide, 2015: An OSSE-based Evaluation of Hybrid Variational-Ensemble Data Assimilation for the NCEP GFS, Part I: System Description and 3D-Hybrid Results, Mon. Wea. Rev.,143, 433-451. • Kleist, D. T., and K. Ide, 2015: An OSSE-based Evaluation of Hybrid Variational-Ensemble Data Assimilation for the NCEP GFS, Part II: 4D EnVar and Hybrid Variants, Mon. Wea. Rev., 143, 452-470. • Kretschmer, M., B. R. Hunt, and E. Ott, 2015: Data assimilation using climatologically augmented local ensemble transform Kalman Filter, Tellus, 67, 9 pp. • Liu C., Q. Xiao, and B. Wang, 2008: An ensemble-based four dimensional variational data assimilation scheme. Part I: technique formulation and preliminary test. Mon. Wea. Rev., 136, 3363-3373. • Lorenc, A. C., 2003: The potential of the ensemble Kalman filter for NWP – a comparison with 4D-VAR. Quart. J. Roy. Meteor. Soc., 129, 3183-3203. • Lorenc, A.C. 2013: Recommended nomenclature for EnVar data assimilation methods. Research Activities in Atmospheric and Oceanic Modeling. WGNE, 2pp, URL: http://www.wcrp-climate.org/WGNE/BlueBook/2013/individual-articles/01_Lorenc_Andrew_EnVar_nomenclature.pdf) • Penny, S., 2014: A hybrid local ensemble transform Kalman filter. Mon. Wea. Rev. 142, 2139-2149..
Sampling of References • Wang, X., C. Snyder, and T. M. Hamill, 2007a: On the theoretical equivalence of differently proposed ensemble/3D-Var hybrid analysis schemes. Mon. Wea. Rev., 135, 222-227. • Wang, X., 2010: Incorporating ensemble covariance in the Gridpoint Statistical Interpolation (GSI) variational minimization: a mathematical framework. Mon. Wea. Rev., 138, 2990-2995. • Zhang F., M. Zhang, and J. Poterjoy, 2013: E3DVar: Coupling an ensemble Kalman filter with three-dimensional variational data assimilation in a limited area weather prediction model and comparison to E4DVar. Mon. Wea. Rev., 141, 900–917. • Zhang, M. and F. Zhang, 2012: E4DVar: Coupling an ensemble Kalman filter with four-dimensional variational data assimilation in a limited-area weather prediction model. Mon. Wea. Rev., 140, 587–600.