Download
1 / 37
370 likes | 400 Views
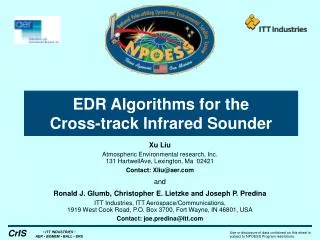
Learn about radar requirements, antenna sizing, SAR processing, system tradeoffs, and radar architecture principles for an advanced radar system. Explore detailed technical specifications of resolution, frequency, antenna design, and processing techniques.

E N D
Summary of Radar Requirements • Vertical Resolution: 10 - 20 metres • Penetration Depth: 300 - 1000 metres • Horizontal resolution: 300 - 1000 metres (along track) • Observation Geometry: Nadir looking • Desired centre frequency: @ 20 Mhz
Antenna Sizing (1) • Vertical Resolution: the required 10 - 20 metres resolution implies the use of modulated radar pulses to preserve Signal to Noise Ratio. Implied theoretical bandwidth: 10 Mhz • The large frequency span entailed by the radar bandwidth over the selected carrier determines rather large variability of the radar wavelength between 12 and 20 metres. • Spacecraft allocation constraints, as far as known today, require very simple antenna concepts, possibily based on simple dipole design: ~7 m tip-to-tip dipole length to match the centre frequency.
Antenna Sizing (2) • Wavelength variation over the bandwidth determines low efficiency of the dipole which preferentially acts as a resonant circuit tuned at the centre frequency. • Fundamental need to match the impendence over the bandwidth through design of a single matching network or multiple networks optimised over sub-bands within the 15 - 25 Mhz spread.
Horizontal Resolution & SAR Processing • The 300 - 1000 m requested along track, imply the use of synthetic aperture processing techniques for resolution enhancing. • Synthetic aperture processing also improves the subsurface detection capability thanks to the reduction of the off-nadir surface clutter power (typical improvement: ~ 10 dB) • Cross track resolution is limited by the radar vertical resolution: roughly from 5 to 7 Km considering orbiter altitudes between 200 and 400 Km.
PR range presentation time time PD range presentation time time Observation Geometry & SAR Concept v H Zmax Height Along Track Isorange Contour Surface Clutter Echoes dynamic range after signal compression & SAR Processing Cross Track Isodoppler Contour time Echo from subsurface
Impacts of SAR Processing on System Design • Use of the synthetic aperture concept has the following two major implications on radar design: • Pulse Repetition Frequency cannot uniquely selected on the basis of orbit and swath extent. Doppler bandwidth shall be correctly sampled. An incorrect selection may entail performance degradation for values lower than the optimal or, if a two much higher value is selected, undesired increase of computational power demand on board and data volume to be transferred on ground. • The final figure of resolution requested determines the complexity of the coherent processing and concequently of the on-board pre-processor architecture.
Horizontal Along Track Resolution (1) • The along track resolution of a radar sounder depends on its frequency of operation and synthetic aperture size: • For the required highest resolution (300 m) focused SAR processing is deemed necessary. Theorethical Formula Lsynt=lH/2raz Limit for Unfocused Processing Lsynt_un= raz_un =(lH/2)1/2 1.2 km < raz < 1.7 km H=200 km H=400 km
Tint=Lsynt/vt 1.4 s < Tint < 2.9 s for raz=300 m 0.4 s < Tint < 0.8 s for raz=1000 m H ~ 200 km Vsc~3452 m/s H ~400 km Vsc~3360 m/s Horizontal Along Track Resolution (2) • To cope with the required 300 - 1000 m resolution the resulting coherent integration time is given by: • For continuous coverage (no gaps) a suitable number of synthetic profiles shall be computed: • N=Tint. Vsc/Raz 32 (worst case)
Radar Architecture (1) • Radar pulse generation based on direct digital synthesis technique to allow the highest degree of flexibility. • Synthesis accomplished at the target frequency (@20 Mhz) with no need for upconversion mixers. • Bands up to 10 Mhz can be synthesised. • Possibility to operate in stepped chirp (subject to trade-off) would allow intrinsic capability to operate as multiple frequency radar with selectable sub-bands in the 10 Mhz planned bandwidth
Radar Architecture (2) • A single large band high power transmitter (10 - 30 Mhz) 40 Watts (TBC - depending on impedence matching network) • Impedence Matching Net based on two options (subject to trade-off): • single large band matching network • 3 to 5 (TBC) matching networks for independent channels under the assumption of operating in stepped chirp modality. • Single dipole antenna approximately tailored to the centre band frequency (~ 7 metres tip-to-tip).
Radar Architecture (3) • RF Receiving chain based on cascade of amplifiers with possibility of dynamic gain regulation to adjust signal level at A/D input. • Calibration net to feed Tx peak power output to LNA input through coupling path. It allows to monitor internal variations of active electronics while passive (matching net and antenna) is characterised on ground.
Radar Architecture (4) • Digitisation to be accomplished on the real channel (IF sampling). Two possible options (subject to trade-off): • high speed digitisation • no down coversion is requested. the signal is directly sampled at 4 times the nominal 20 Mhz carrier frequency. A/D sampling speed: 80 Ms/s (power consumption < 1 W). • low speed digitisation • downconversion to a lower frequency is implemented. Need to include a mixer and band pass filter. After filtering the signal is sampled at a rather modest rate: 9.6 Ms/s. • Down sampling and I/Q synthesis accomplished in the digital section using DSP or FPGA (the latter to be preferred in the high speeed digitisation option for its possibility to implement parallel architectures - subject to trade-off ).
T/R Switch Impedence Matching Net Tx Amp BPF LNA Radar Functional Block Diagram Power bus Power Distribution DCG S/C Data & Cmd Bus Div Data I/F Echo Processor Timing Cmd/Crtl A/D & I/Q Synthesis Stalo G Subject to trade-off
Shallow Radar Hierarchical Configuration S/C SUBSYSTEMS OTHER PAYLOADS
Summary Table of Preliminary System Parameters Antenna: half wave dipole ~7 m length (tip-to-tip) Centre Frequency: 20 Mhz Radiated Peak Power: 10 W Pulse Length: 250 ms (single chirp - option 1) 3 x 80 or 5 x 50 ms (stepped chirp - option 2) Pulse Bandwidth: 10 Mhz (option 1) ~ 2 - 3 Mhz (option 2) Pulse Repetition Frequency: 300 Hz Vertical Swath Range: 40 ms (6 Km - free space) A/D Resolution: 10 bits A/D frequency: 80 Mhz (option 1) 9.6 Mhz (option 2)
Operative Modes • Silent Modes • OFF All units are OFF • HEATING Only Heaters are ON • Support Modes • CHECK/INIT RDS (DES only) is ON • STANDBY RDS (DES only) is ON • WARM-UP1 RDS (DES+RX) is ON • WARM-UP2 RDS and TX are ON • IDLE RDS (DES only) is ON • Operation Modes • SS LOW Subsurface Mode (RF transmission/Low Data Date) • SS HIGH Subsurface Mode (RF transmission/High Data Date) • CALIBRATION Calibration Mode (RF transmission) • RECEIVE ONLY Passive mode (no RF transmission)
Calibration • Three different calibration steps are envisaged: • On-ground Calibration/Characterization • Specific radar parameters (TX Power, RX Gain, time delay, etc.) will be characterized on ground (at different temperatures) and their values will be introduced in the radar database • In-flight/on-ground Internal Calibration • The transmitted signal (before the matching network) will be re-routed inside the receiving section of the radar and the relative data will be sent to ground • In-flight External Calibration • The HW distortions (including Antenna and Matching network) will be calibrated acquiring unprocessed echoes from selected (flat) Mars regions
Validation • Two different validation steps are envisaged: • On-ground Validation/Verification • To validate the instrument performance, echoes from MARS will be simulated both in close loop configuration (starting from the TX signals) and in open loop configuration (using mathematically simulated echoes) • In-flight Validation • A limited amount of raw data (Individual Echoes) will be acquired (in selected Orbits) together with the processed data and transmitted to the ground to check if the instrument is working as expected
Data Rate & Data Volume • Stepped Chirp (example of 5 sub-pulses transmitted) - Raw data: 10.3 Mbit/s ~12 Gbit for 20 min. operation Assumptions: processing entirely done on ground - Processing on board:375 kbit/s~440 Mbit for 20 min. operation Assumption: each sub-band is processed independently: doppler processing is done on board & range compression done on ground by downlinking up to 32 doppler filters (300 metres azimuth resolution - worst case condition)for each of the 5 sub-bands. Re-combination and synthesis of the 10 Mhz equivalent bandwidth in range is done on ground. This allows precise re-alignment of the sub-bands for optimal performance.
Mass Budget • REMARKS: • EMI Shielding and Heaters (TBD kg) are not included • Inter-Units Cabling considered part of the payload mass • Cabling weight is function of payload accommodation
Envelope • REMARK: TX and Antenna dimensions are max envelopes currently based on MARSIS mechanical design
Power Budget • Instrument Budget • Heaters Budget
Design & Development Approach (1) Design and Development will be based on the sequencing of the following four project phases: • Concept Definition: devoted to system level architecture definition and trade-offs • Design & Breadboarding: devoted to detail system definition and breadboarding of critical items • EM Development: devoted to development, manufacturing and testing of a complete Engineering Model to validate instrument design and allow a ProtoFlight development. • PFM Development: devoted to development, manufacturing and testing of a fully qualified Flight Model on the basis of the proven design.
Design & Development Approach (2) Major project Milestones intermediate to the Instrument Delivery are: • Instrument Concept Review purpose: to review instrument concept • Instrument Preliminary Design Review purpose: to review instrument design and release the electrical and mechanical detailed design for the EM development. • Critical Design Review purpose: to freeze instrument design and to release Protoflight Development. • Instrument Delivery Acceptance Review purpose: to review the results of PFM testing in view of its integration in the satellite
Model Philosophy • Interface Engineering Model (IEM) Used for development testing of SHARAD interfaces with the Spacecraft. The IEM will be the first electrical model and will be used to provide verification of the electrical and mechanical interfaces with the Spacecraft. The IEM will be electrically tested for proper operation of the external interfaces only. • Engineering Model (EM) Used for development testing of SHARAD technical and engineering parameters. It is electrically and mechanically representative of the instrument. The EM will be the model that fully supports all Sounder operation and will be used to provide verification of these functionality’s. Tentatively (depending on procurement constraints) flight PCB and flight mechanical structure will be used in order to achieve environmental testable subsystems (EQM). • Protoflight Model (PFM) Used for verification of SHARAD technical and engineering parameters. The PFM will be fully flight standard. It will be subjected to qualification level and duration testing. Note: If an EQM is manufactured, a Flight Model (qualification and duration of environmental tests at acceptance level) can be developed.
Integration/Testing & Verification Flow Receiver &Digital S/S TX &Imped. Match. S/S MGSE EGSE Panel Incoming Incoming Incoming Incoming Incoming START Installation Integration Incoming Miscellanea Antenna S/S Incoming Radar Electronics test Continuity Test Shipment to S/C Incoming Integration at S/C level Electrical I/F Operational Characterisation EMC Performance Thermal S/C Reference Radar Checkout + Continuity Test ORBITER Verification & Prelaunch Phase
Testing & Verification: Explanatory Notes (1) • PFM subsystems will undergo to the qualification steps through Electrical, Functional, EMC, Thermal-Vacuum, Vibration tests. • At instrument integrated level the following set of tests will be performed: • Electrical I/F • Operational • Characterisation/Calibration • EMC (reduced Set) • Inital Performance Tests • Thermal Cycle • Final Performance Tests • S/C Reference Tests (to be used as future reference at satellite level)
Testing & Verification: Explanatory Notes (2) • PERFORMANCE VERIFICATION (i.e. assessment on the capability to detect subsurface features) will be performed through RSS device. Performance is verified at ambient before (IPT) and after (FPT) thermal cycling, and a reduced set of tests will be performed during the thermal. • Reference S/C test will be used as checkout mean to verify instrument operation during ORBITER integration/verification phases. • A continuity test (injection of electrical signal) is foreseen to check integrity (electrical continuity) of antenna at several steps of the integration process. Feasibility of test is to be checked wrt antenna design.
On-ground Validation/Verification MEGS: Mars Echoes Generator SHARAD Input Buffer ADC FFT Mars Transfer Function RF-FEE RDS TX Output Buffer DAC IFFT Simulated Echoes (Open Loop) Galactic Noise Timing Signals Timing Generator Reference Frequency