Download
1 / 7
70 likes | 183 Views
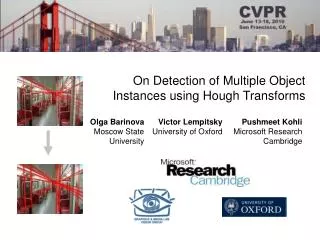
This project focuses on the application of Hough Transforms and computer vision in creating a self-navigating car. Initially aimed at collaborating with the IGVC team, the work evolved into an independent project, collecting video footage of Beckman Hallways. Key accomplishments include the use of Hough Transforms for line detection through initial image edge detection and final results analysis. Future steps involve eliminating unnecessary lines and leveraging useful line and vanishing point data to identify navigable areas. The ultimate goal is to equip an RC car with a webcam for autonomous driving through laptop communication.

E N D
By Jacob Mandozzi Graduate Mentor: SankethShetty Hough Transforms and Computer Vision Systems
Project Ambitions • Originally set out to work with IGVC team, but that fell through • Work independently on self-navigating car • Gathered video of Beckman Hallways • Worked on Video Processing using Hough Transforms for line detection
Next Steps • Get rid of all unnecessary lines. • Use the useful lines and vanishing point information to determine where the navigatable portions of the image are • Final Goal: Hack a RC car with a mounted webcam to drive itself by communicating with laptop