Download
1 / 36
370 likes | 477 Views
Learn about the principles and design calculations of automated potential difference calibrators for accurate measurements in electrical circuits and temperature sensors. Understand the components and working mechanisms involved.

E N D
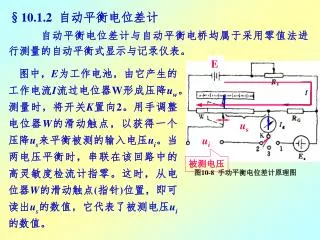
图10-8 手动平衡电位差计原理图 §10.1.2 自动平衡电位差计 自动平衡电位差计与自动平衡电桥均属于采用零值法进行测量的自动平衡式显示与记录仪表。 E 图中,E为工作电池,由它产生的工作电流I流过电位器W形成压降uw。测量时,将开关K置向2。用手调整电位器W的滑动触点,以获得一个压降us来平衡被测的输入电压ui。当两电压平衡时,串联在该回路中的高灵敏度检流计指零。这时,从电位器W的滑动触点(指针)位置,即可读出us的数值,它代表了被测电压ui的数值。 us ui 被测电压
图10-8 手动平衡电位差计原理图 §10.1.2 自动平衡电位差计 如果将电位器W的滑动触点由伺服电动机(可逆电动机)通过机械传动机构来带动,而伺服电动机则根据测量回路信号u的极性不同,可以正转或反转,这样就变成了自动平衡式电位差计。 E us ui 被测电压 u= ui- us > 0 < 0 = 0
us 图10-9 自动平衡电位差计原理图 1.自动平衡电位差计的工作原理 图10-9所示是一种与热电偶配套的自动平衡电位差计,其输入信号是热电偶传感器输出的热电势。 u ut 热电偶的热电势与不平衡电桥的输出电压叠加比较之后,送到放大电路的输入端。不平衡电桥由起始调零电阻RG、冷端温度补偿电阻R2、限流电阻R3与R4及滑线电阻Rp组成。通过滑动Rp电阻的滑动触点A,就可以在电桥的输出端A、B获得不同的电压us。此类仪表就是利用us来平衡被测的热电势ut的。
图10-9 自动平衡电位差计原理图 设原被测温度为t1,热电势ut1正好与电桥输出us1平衡, u =0。 若温度从t1升高到t2,热电势增大到ut2,使得 u(=ut2 - us1)>0 正极性的偏差电压u输入到相敏放大器,使放大器输出的交流电流极性正好使可逆电机M正转。电机M正转时,一方面拖动指针与记录笔右移,指示温度升高;另一方面又拖动滑线电阻Rp的滑动触点A也右移,使us升高。
当升高到us2等于ut2时, u = ut2 - us1 = 0 放大器的输入u为零,其输出亦为零,电机M停止转动。滑动触点A便停留在使电桥输出为us2的位置上,指针与记录笔停在对应温度为t2的位置上,系统又恢复平衡,但它是在t2温度下的平衡。此后,若温度下降到t3 < t2,系统重新失去平衡,且u = ut3 - us2 < 0,负极性的u使电机M反转,并拖动指针与记录笔左移,指示温度下降,与此同时,滑动触点A左移,使us下降到重新平衡时为止。该系统就是这样使指针与记录笔跟随被测温度t变化。
指针向温度t 减小的方向偏移 2. 桥路电阻的作用 图中所示电桥中的各个电阻,除热电偶的冷端温度补偿电阻R2为铜电阻外,其它都是采用电阻温度系数很小的锰铜电阻,具有较高的温度稳定性。 RG+RAP 限流电阻R4与R3的作用是,用R4限定电桥上支路的电流为恒定的4mA;用R3限定下支路的电流在标准环境温度20℃时为2mA。 调零电阻RG实际上由两个电阻串联而成,即RG = R’G + rG。rG用作微调:rG取较大值时,仪表指针向温度t 减小的方向偏移;rG取较小值时,指针向t 增大的方向偏移。(使电桥重新平衡)
滑线电阻Rp的电阻丝要求绕制均匀,非线性度小于0.2%,满足0.5级仪表的精度要求。 工艺电阻RB与滑线电阻Rp并联,且使并联后之阻值正好等于900.1。若不等于900.1,则通过调整RB的阻值使之为900.1。这样就可以适当降低对于Rp的绕制精度要求,有利于批量生产。 900.1 量程调整电阻RM实际上是由电阻RM与rM串联而成的,用RM来变换量程,用rM来微调量程。因RM、Rp、RB并联,所以RM愈大则量程愈大,反之亦然。(设计RM<<Rp//RB) R’P是便于滑动臂滑动的辅助滑线电阻,兼起引出线的作用。
3. 测量电路的设计计算 1)下支路电阻的设计计算 通常取电桥供电电压E=1V,下支路电流I2在20℃时为2mA。因已知E与I2,则 在标准环境温度t0=20℃时的热电偶冷端补偿电阻值 设下支路电阻比值 温度补偿的比例系数 则 (10-9)
进一步可计算出 • 值决定补偿的强弱,与被补偿的热电偶型号有关,也与冷端温度的变化范围有关。当热电偶冷端温度由环境温度下限t01变化到环境上限t02时,则热电势将减少E(t02,t01);而冷端温度补偿电阻将由 变化到 ,下支路电流将由 变化到 ,即
式中 ,故可略去分母中 项; 又由于 将其代入上式得
将 代入上式并整理得 (10-10) 由式(10-9)可计算出下支路电阻:
2.上支路电阻的设计计算 上支路的设计主要是计算RM、R4与RG。滑动臂A从最右端移到最左端所扫过的电压降(即电位差计的量程)EM(tmax,tmin)为 Gfd fhj 为电阻Rp的工艺参数。 Rnp
2.上支路电阻的设计计算 上支路的设计主要是计算RM、R4与RG。滑动臂A从最右端移到最左端所扫过的电压降(即电位差计的量程)EM(tmax,tmin)为 Gfd fhj 把Rnp代入上式,得量程电阻为 (10-11) 当标准环境温度为t0,热电偶的热端温度为tmin时,滑线电阻的滑触点应位于起始端位置,电桥的输出电压与输入的热电势相平衡: 20℃时为2mA 则调零电阻为 (10-12)
上支路电流为恒定电流,且 由此可求限流电阻R4 (10-13) 这样根据仪表的量程范围、配用热电偶的分度号、铜补偿电阻的温度系数以及环境温度的变化情况,便可按(10-11)~(10-13)式,分别求出各桥臂的电阻值,它既可用于测量桥路的设计,也可用于现成仪表的改量程。 例如,当不改变仪表所配热电偶的分度号,只改变量程时,则需改变量程电阻RM、起始电阻RG和限流电阻R4即可;如仪表所配分度号也改变,则除RM、R4与RG改变外, 、Rnp也要改变, 这属于测量桥路的重新设计问题。
计算举例:已知仪表量程为0~800℃,配用K分度号热电偶,桥路电源电压E=1V,上支路电流I1 = 4 mA,下支路电流 环境温度t0=25℃,t02 = 55℃,t01 = 5℃,铜电阻在25℃时的 ,λ=3﹪。 根据已知条件查表可得: E(tmax,t0)=E(800, 25)=32.29mV E(tmin,t0)= E(0,25)= - 1mV E(t02,t01)=E(55, 5)=2.03mV EM(tmax,tmin)=E(800,0)=33.29mV 计算:
§10.1.3自动平衡电桥 自动平衡电桥可与热电阻Rt配合用于测量温度。自动平衡电桥的工作原理与自动平衡电位差计相比较,只是输入测量电路不同,因此本节着重讨论输入电路。 1. 自动平衡电桥的工作原理
A R4 RL Rt RG RPB RM R3 RL R2 B 走纸方向 稳压电源 图10-10 自动平衡电桥工作原理 热电阻Rt接在测量桥路中,当被测温度为t1时,热电阻Rt的阻值为Rt1,若电桥正好处于平衡,则电桥的输出端A、B之间的电位差UAB = 0。如果温度升高到t2 > t1,则有Rt2 > Rt1,电桥失去平衡,此时电桥的输出电压UAB > 0。UAB输入到调制放大器,使伺服电机M正转,并带动指针及记录笔右移,指示温度升高;与此同时,电机M又拖动滑线电阻的滑动臂A向右移,直到电桥在新的输入Rt2下重新平衡为止。此后,若温度又从t2下降到t3,则有Rt3 < Rt2,电桥失去平衡,其输出电压UAB< 0,电机M反转,并使指针左移、滑动臂A左移,直到重新达到平衡为止。每次达到平衡后,指针、记录笔和滑动臂A的位置都与当时的被测温度相对应。
图10-11 自动平衡电桥的等效电路 2. 测量电路的设计计算 自动平衡电桥的等效简化电路如图10-11所示。 对于直流电桥,在设计计算时,一般取供电电压E=lV,流过Rt支路的桥臂电流最大值I1M要小于6mA,以免Rt发热造成误差。一般取I1=3mA。 I1 在进行桥路计算时,常分成中量程、小量程和大量程情况进行计算。
图10-11 自动平衡电桥的等效电路 1)电阻值的变化范围在10~100的中量程仪表桥路的计算 对于直流电桥,一般采用E=1V的电源,取R2=R3=R4,这时由于热电阻连接导线随环境温度变化所产生的附加最大温度误差只有10-4数量级,故计算时不予考虑。 (1)量程电阻RM 在仪表刻度起始点时,热电阻值最小,流过热电阻的电流最大,这时桥路上支路的总电阻为R'
图10-11 自动平衡电桥的等效电路 Rnp 式中 若被测温度t为下限温度t = t0,则Rt=Rt0。电桥平衡时,滑动臂应在最右端,其平衡方程式为: • Rt0+ RL+ RG+(1-) Rnp R3 = (RL+ R2)( R4+ Rnp) (10-14) 式中 Rnp = RpB// RM,取RpB=90 RL: 连接导线的等值电阻,取RL =2.5; RG: 调零电阻 : 滑线电阻两端不工作部分所占的份额,取=0.03~0.05
图10-11 自动平衡电桥的等效电路 Rnp 若被测温度为上限温度t = tM = t0+tM,则Rt=RtM = Rt0+RtM,电桥平衡时,滑线电阻的滑动臂应在最左端,平衡方程式为 (Rt0+RtM + RL+ RG+ Rnp)R3 = (RL+ R2) R4+(1-)Rnp 由上式减 (10-14) 式得 Rt0+ RL+ RG+(1-) Rnp R3 = (RL+ R2)( R4+ Rnp) (RtM +2 Rnp- Rnp) R3 = (Rnp-2 Rnp)( RL+ R2) 整理后得
(10-15) 式中 i——下支路的电阻比, 因为 所以 (10-16)
图10-11 自动平衡电桥的等效电路 (2)桥臂电阻R2、R3与R4 ① 用上支路总电阻R' 计算 由仪表的动作原理可知:当热电阻从仪表下限Rt0变化到仪表上限RtM时,则对应的滑线电阻的变化值为(1-2)Rnp;因此当滑线电阻变化Rnp,则相应的热电阻变化应为
图10-11 自动平衡电桥的等效电路 假设滑线电阻的滑触点位于最右端Rnp以外位置时, 则对应的热电阻应为Rt0-Rt ,则电桥具有下列平衡关系,即 (Rt0-Rt + RL+ RG+Rnp)R3 = (RL+ R2)R4 因为 R2=R3=R4, 由上式得 (10-17)
图10-11 自动平衡电桥的等效电路 (10-17) 考虑到 则(10-17)式可写成 (10-18) 所以 (10-19)
②用下支路总电阻R计算 先选择下支路桥臂电流I2,如取I2 = I1= 3mA,则下支路总电阻R为 由于 所以 (10-20)
③ 调零电阻RG 由式(10-14)可得 Rt0+ RL+ RG+(1-) Rnp R3 = (RL+ R2)( R4+ Rnp) (10-21) 或由式(10-17) 得 (10-22) 由式(10-14) 计算结果与由式(10-17) 计算结果相同。
热电阻的阻值变化范围为10~100的中量程仪表是工业上最常用的,若用于和热电阻配套测量温度,则对应的温度范围也是相当宽的。在此范围内的仪表桥路电阻的计算均采用 It0=3mA, R2=R3=R4=165 这样,电阻值的变化在此范围内时的仪表改变量程,或改变所配分度号或两者同时改变,都只须改变起始刻度电阻RG和量程电阻RM即可。 例1. 已知仪表配分度号为Pt l00的热电阻,仪表量程为0~50℃,ItM=6mA,Rt0=100,RtM=119.7,RtM=19.7,供电电压E=1V,=0.03,求直流电桥桥路参数。 解: 由题意知,该热电阻的变化范围为RtM=19.7,是属于中量程范围,所以取 R2=R3=R4=1650.5 此时,必须重新计算R'∑,再求通过热电阻支路的电流是否超过规定的最大限值。
由式(10-19)可得上支路总电阻 则It0=E/ R’∑=1000/333.13 = 3 mA < 6 mA 由计算知道,通过热电阻支路的电流符合要求。 由式(10-15)得
则由式(10-16)得量程电阻: 由式(10-22)得调零电阻 : 实际制作时可取 RM =11.5 0.2 RG =55 0.5
2)对于小量程(RtM<10)和大量程(RtM>100)时的特殊情况的桥路计算2)对于小量程(RtM<10)和大量程(RtM>100)时的特殊情况的桥路计算 (1)小量程(RtM<10)仪表测量桥路的设计计算 对于小量程仪表,因RtM较小;而上支路电流I1也受被测电阻热效应的影响,不能取的太大,必须小于或等于6mA,一般是3mA;所以为了提高桥路电压灵敏度,就必须减小下支路臂比 i,通常在设计时,取 R3=R4和 i<1 具体算法与中量程相同。
(2)大量程(RtM>100)仪表测量桥路的设计计算 对于大量程仪表,应提高i,常采用: R3=R4和 i 2 ,R2=iR3-RL的方法,然后再采用中量程的计算方法,可得大量程的计算公式(对于小量程亦适用)如下: (10-23) (10-24) 滑线电阻Rnp、量程电阻RM 、调零电阻RG的计算公式与中量程时相同。为了使大量程仪表的量程电阻RM的绕制和调整方便,通常取 R3=R4 = 80R2 = 250 因此大量程仪表的改量程或改分度号或两者同时改,仅须改变RM和RG即可。
例2.已知仪表配用分度号为Pt l00的热电阻,仪表量程为0~500℃,Rt0=100,RtM=183.8,ItM≤6mA。供电电压E=1V,=0.03,求桥路参数。 解: 取 R3 = R4 = 800.5 R2 = 2500.3 此时下支路臂比为 由于R2、R3和R4采用固定数值,所以须计算R'∑,然后算出I1是否满足小于或等于6mA的规定。
由式(10-23)可得 所以 It0=E/ R'∑=1000/338.366 3 (mA) <6mA, It0符合规定。
则量程电阻为: 调零电阻 为: 实际取: RM =98.3 0.2 RG =108.5 0.5