Download

1 / 25
0 likes | 17 Views
Surveillance graph theory for GRAPH-CLEAR involves detecting intruders using robots with blocking and sweeping actions in a weighted graph environment. The process includes creating a surveillance graph, finding local clearance minimas, optimizing the graph structure, and solving the GRAPH-CLEAR problem efficiently. Results show applicability to real-world scenarios with potential for probabilistic variants and local optimizations.

E N D
Building Surveillance Graphs for GRAPH-CLEAR Andreas Kolling & Stefano Carpin UC Merced Presented by Pras Velagapudi FRC Nav. Reading Group - Nov. 2, 2009
Problem: Pursuit-evasion • Spatial (typically 2D) world • Assumptions about intruders: – Know where robots are – Can move unboundedly • Objective: – Find a sequence of actions that detects all intruders using the least number of robots FRC Nav. Reading Group - Nov. 2, 2009
GRAPH-CLEAR • Formalized subclass of pursuit evasion • Environment is weighted graph • Two actions – Blocking • Robot sits on edge, intruder can’t pass – Sweeping • Robot searches vertex, determines if intruder is present FRC Nav. Reading Group - Nov. 2, 2009
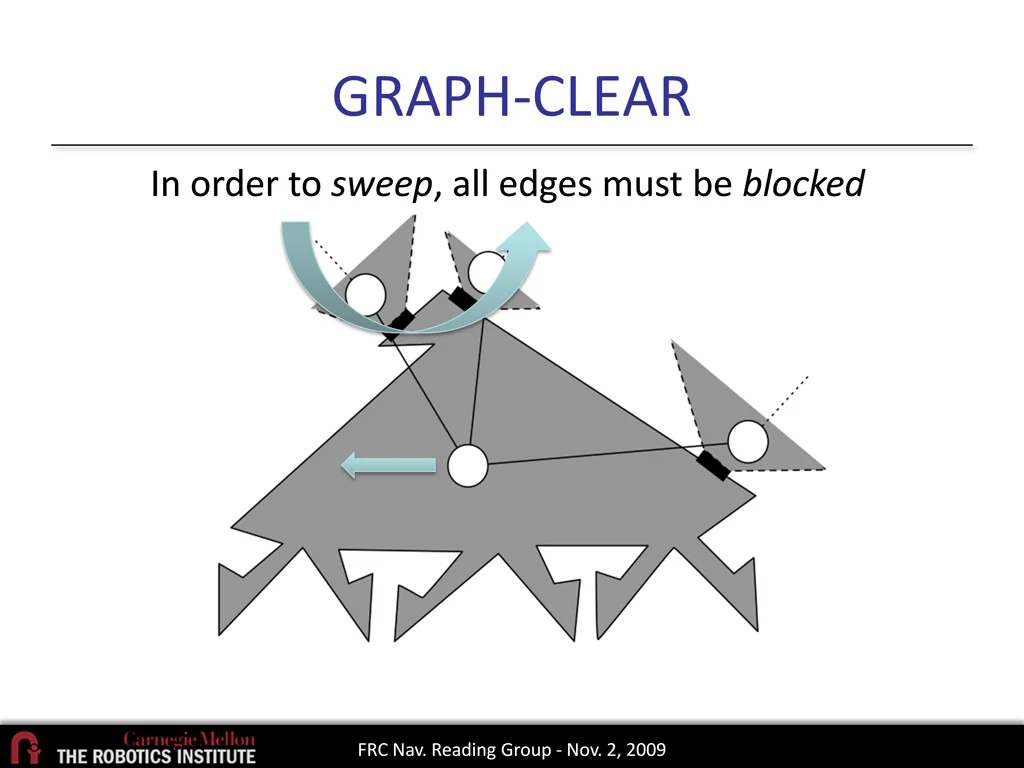
GRAPH-CLEAR In order to sweep, all edges must be blocked FRC Nav. Reading Group - Nov. 2, 2009
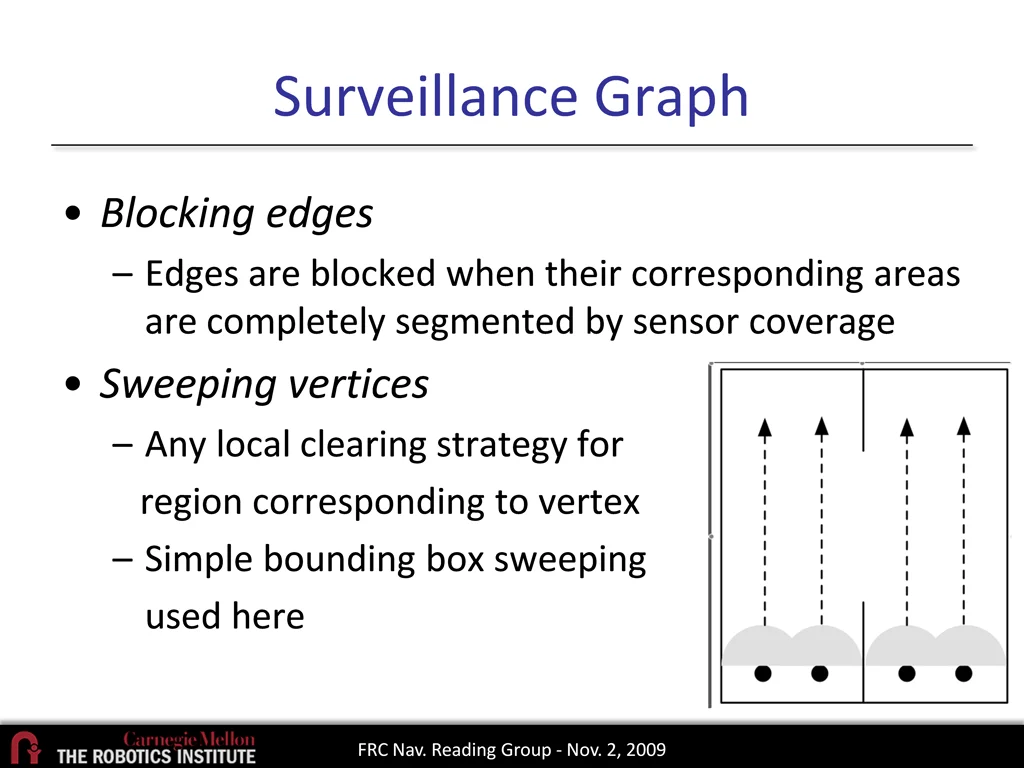
Surveillance Graph • Blocking edges – Edges are blocked when their corresponding areas are completely segmented by sensor coverage • Sweeping vertices – Any local clearing strategy for region corresponding to vertex – Simple bounding box sweeping used here FRC Nav. Reading Group - Nov. 2, 2009
Moving to the real world… FRC Nav. Reading Group - Nov. 2, 2009
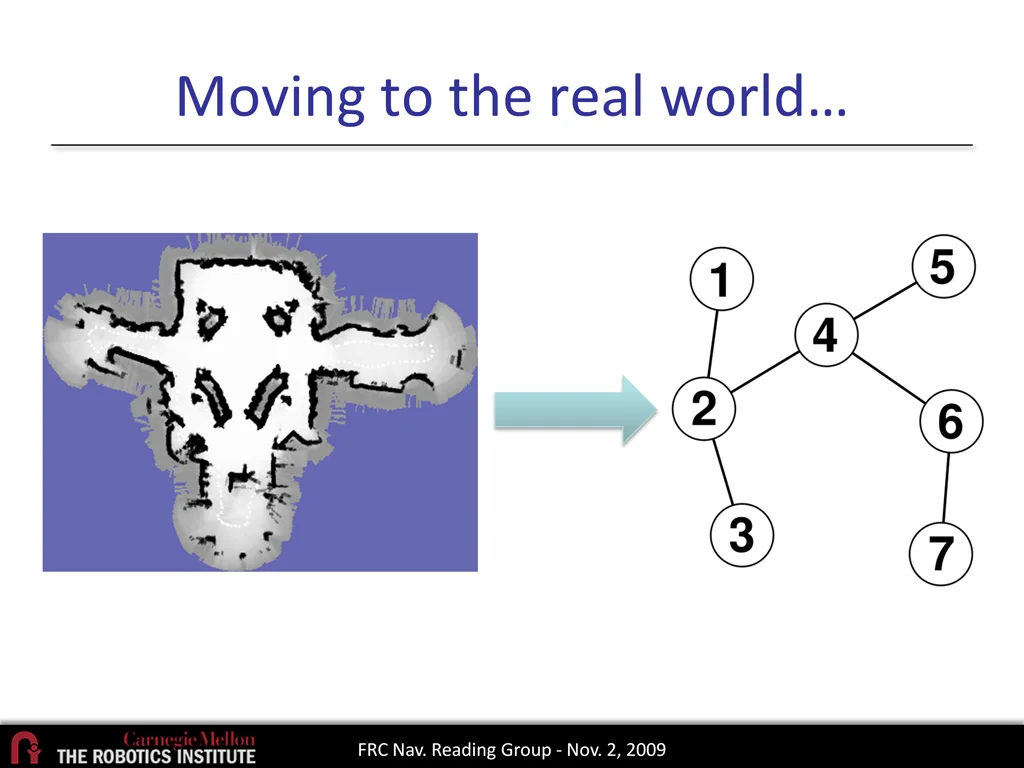
Moving to the real world… Step 2: ??? Step 3: Profit! Step 1: Surveillance Graph GRAPH- CLEAR Solver FRC Nav. Reading Group - Nov. 2, 2009
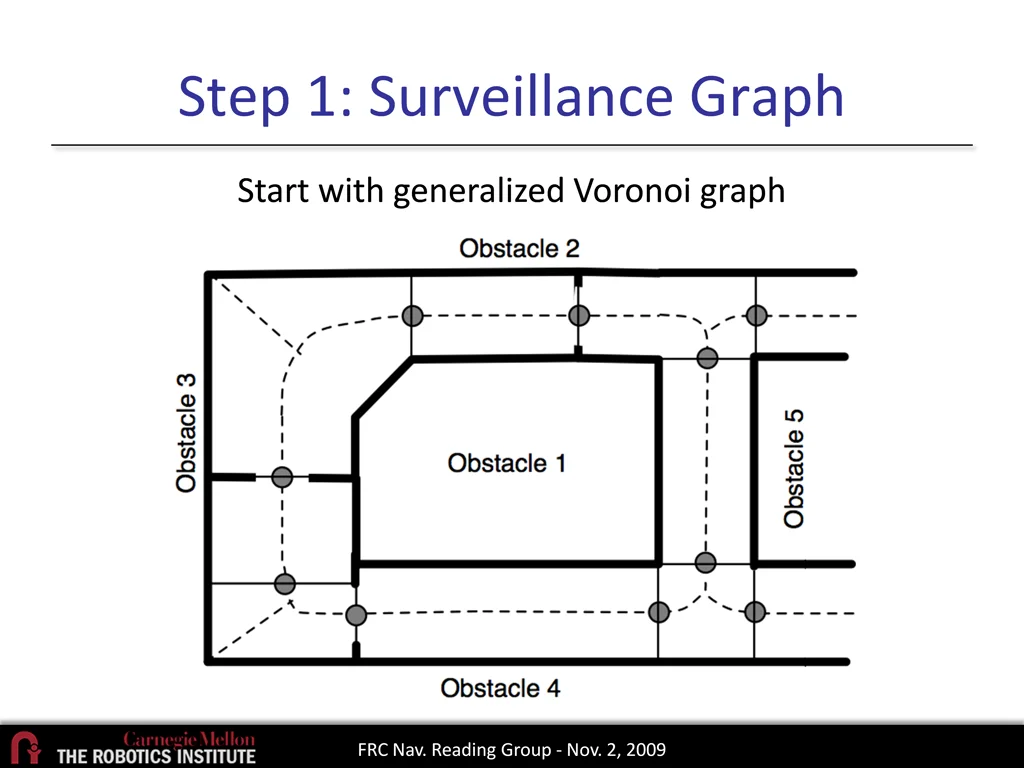
Step 1: Surveillance Graph Start with generalized Voronoi graph FRC Nav. Reading Group - Nov. 2, 2009
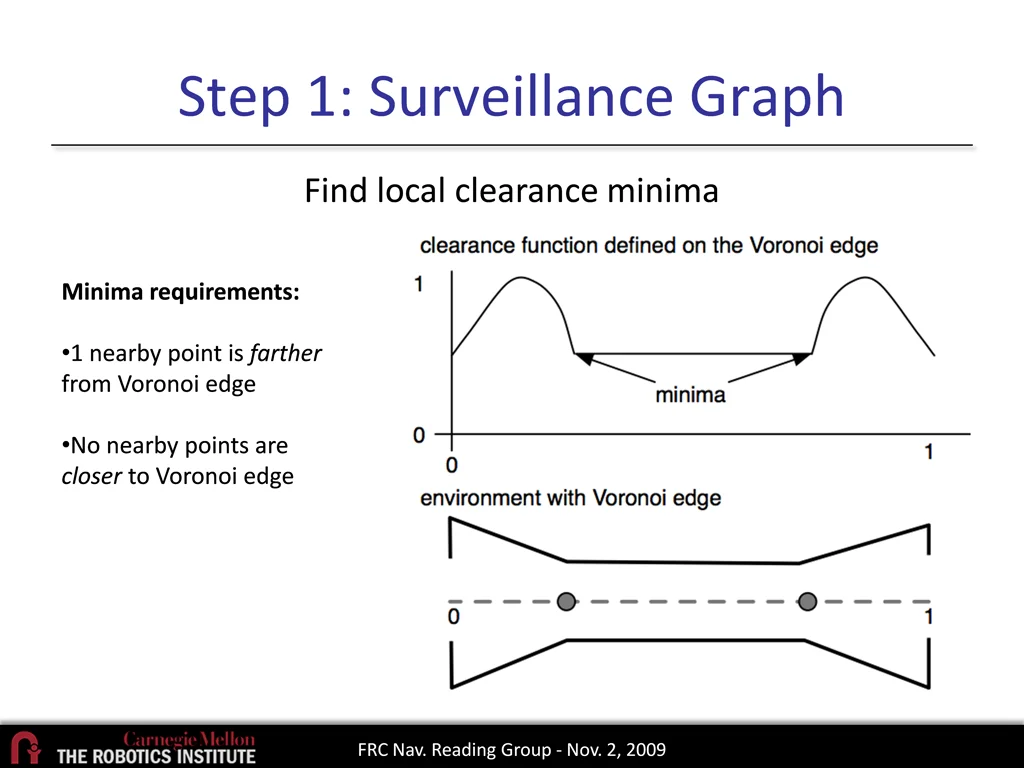
Step 1: Surveillance Graph Find local clearance minima Minima requirements: •1 nearby point is farther from Voronoi edge •No nearby points are closer to Voronoi edge FRC Nav. Reading Group - Nov. 2, 2009
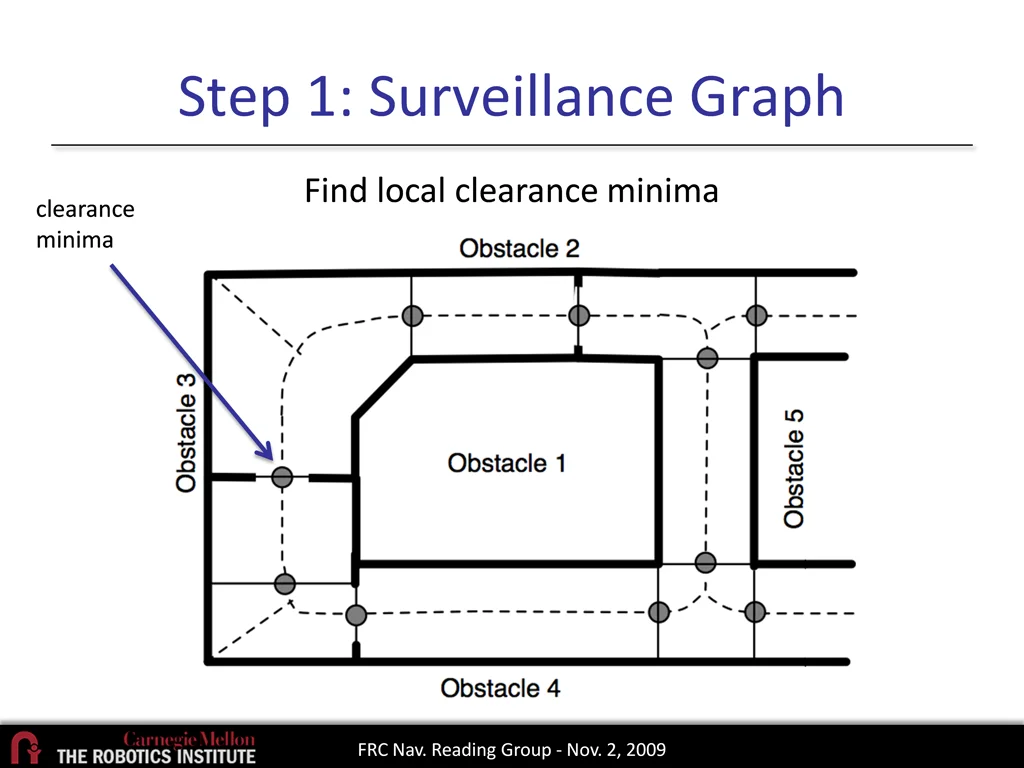
Step 1: Surveillance Graph Find local clearance minima clearance minima FRC Nav. Reading Group - Nov. 2, 2009
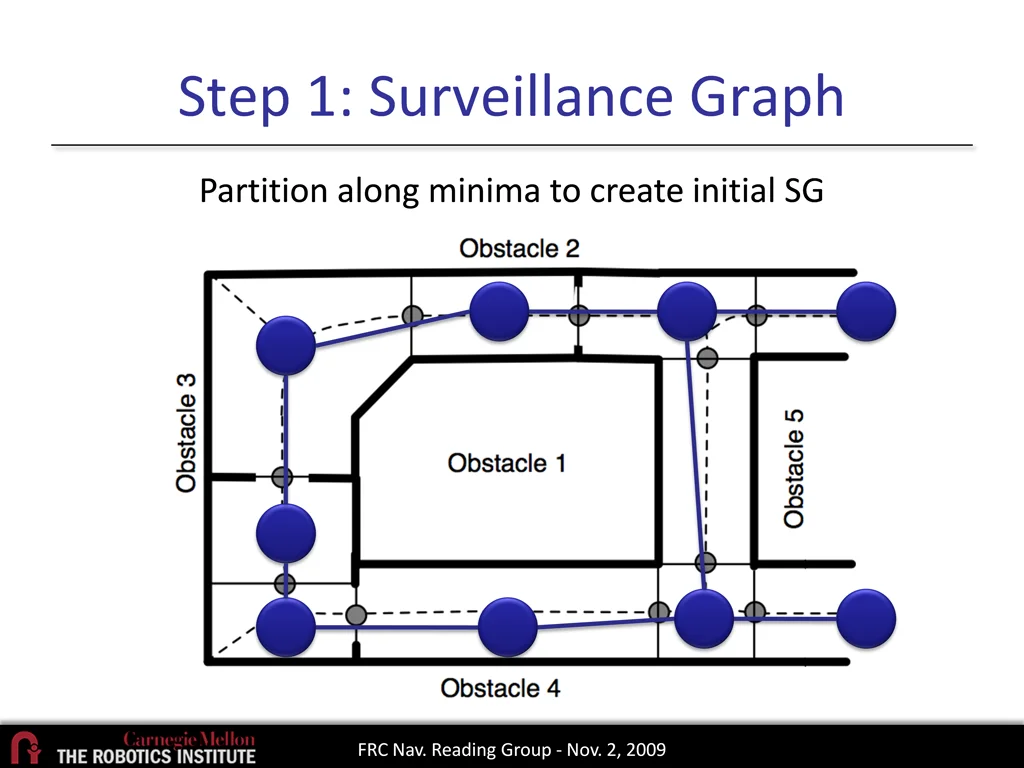
Step 1: Surveillance Graph Partition along minima to create initial SG FRC Nav. Reading Group - Nov. 2, 2009
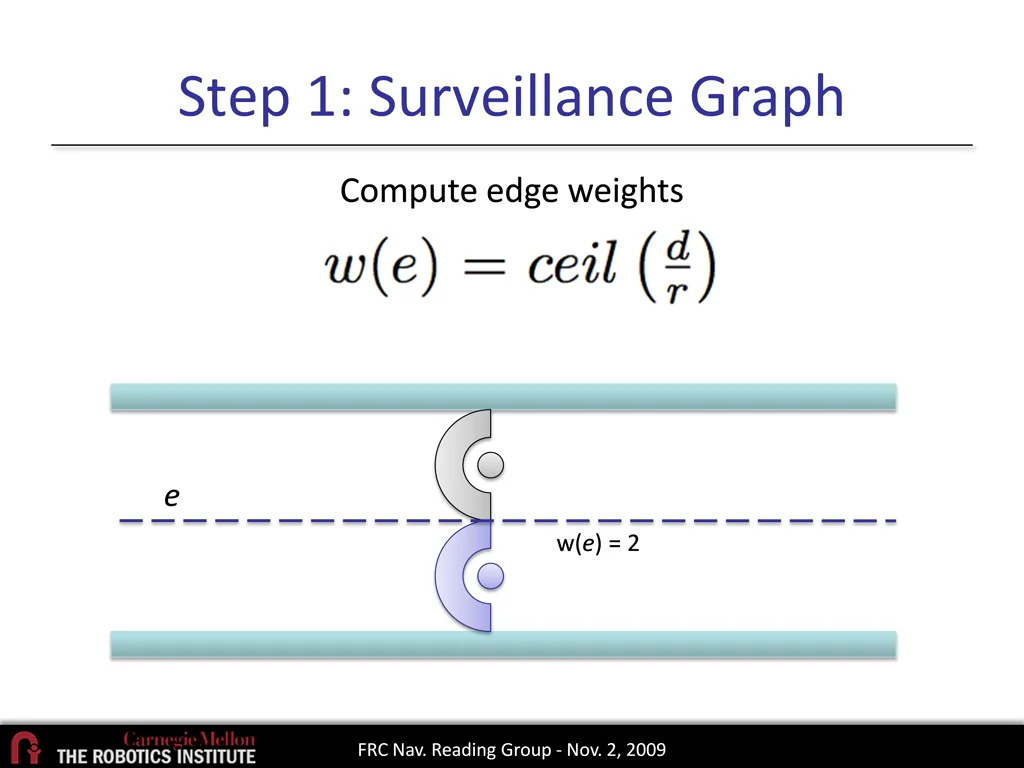
Step 1: Surveillance Graph Compute edge weights e w(e) = 2 FRC Nav. Reading Group - Nov. 2, 2009
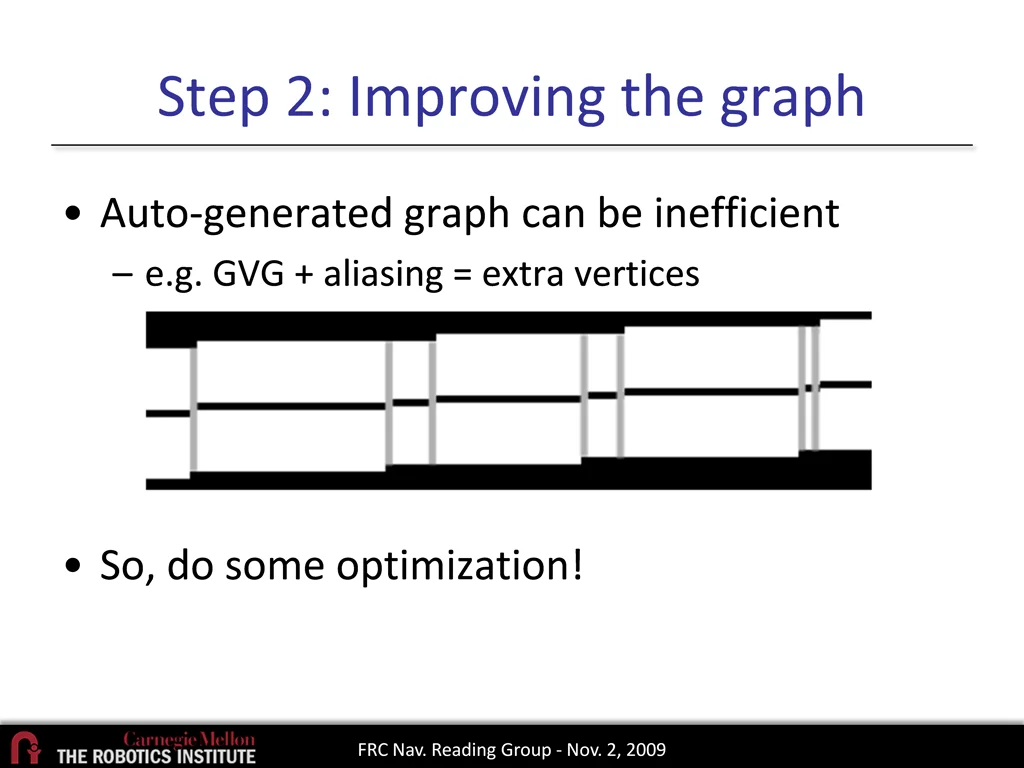
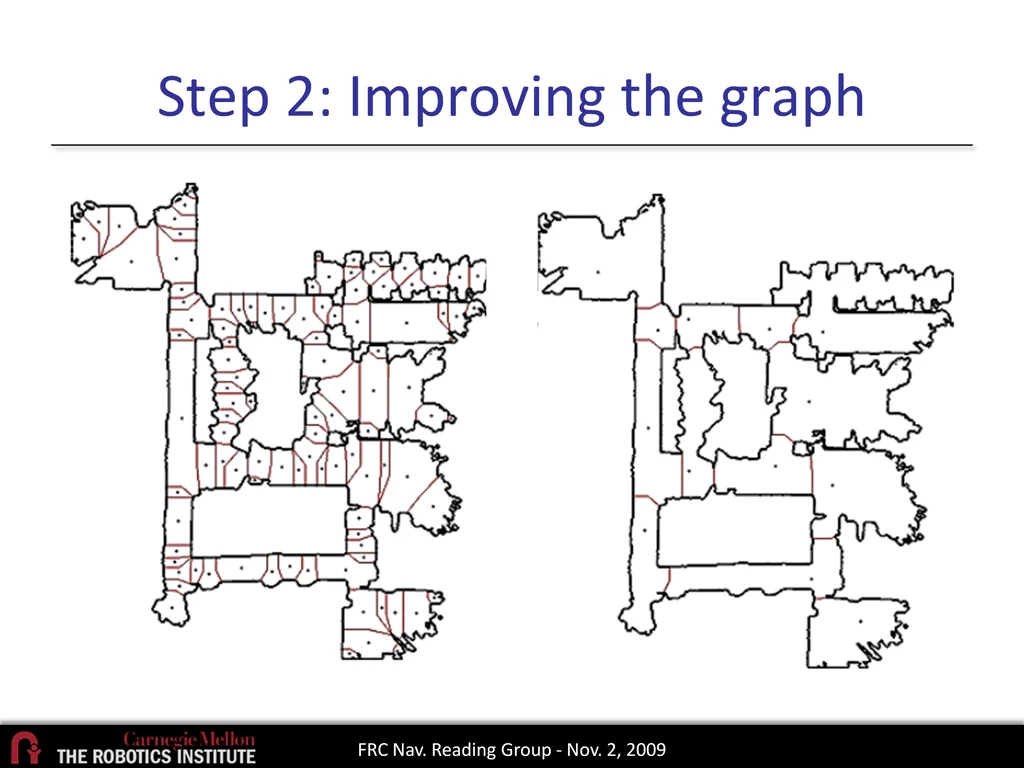
Step 2: Improving the graph • Auto-generated graph can be inefficient – e.g. GVG + aliasing = extra vertices • So, do some optimization! FRC Nav. Reading Group - Nov. 2, 2009
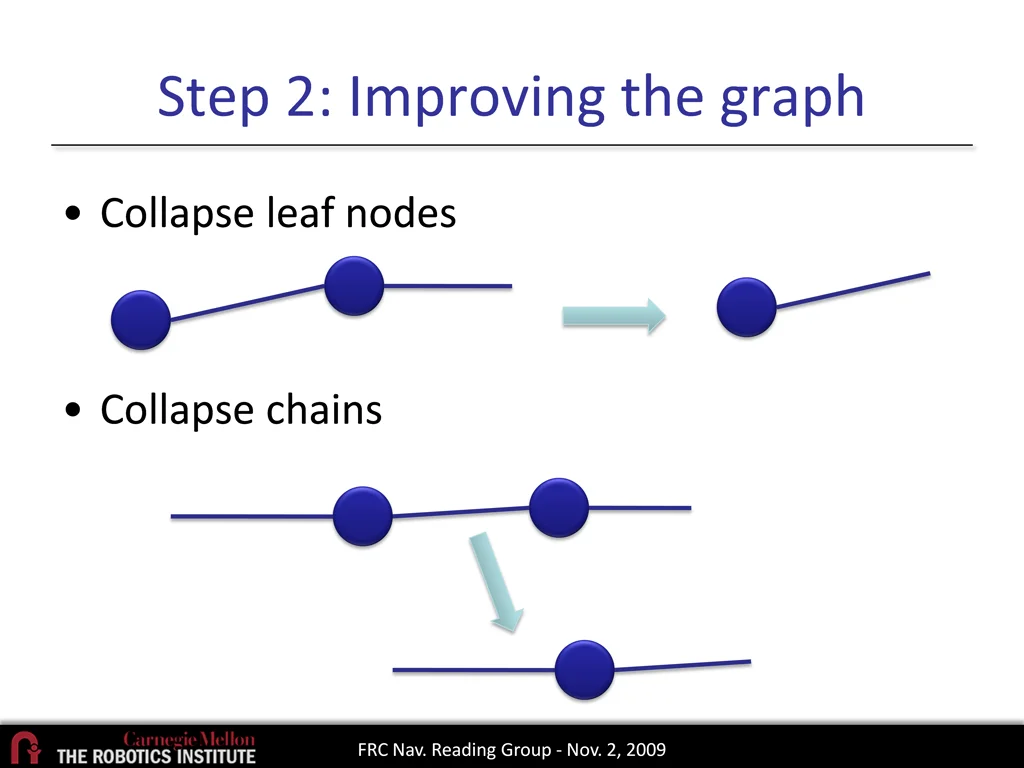
Step 2: Improving the graph • Collapse leaf nodes • Collapse chains FRC Nav. Reading Group - Nov. 2, 2009
Step 2: Improving the graph FRC Nav. Reading Group - Nov. 2, 2009
Step 3: GRAPH-CLEAR solving • Start with weighted surveillance graph • Edges = narrow corridors between regions • Vertices = wide and open regions • Weights = # of robots to sweep/block area • Vertices = {Contaminated, Clear} • Edges = {Contaminated, Clear, Blocked} FRC Nav. Reading Group - Nov. 2, 2009
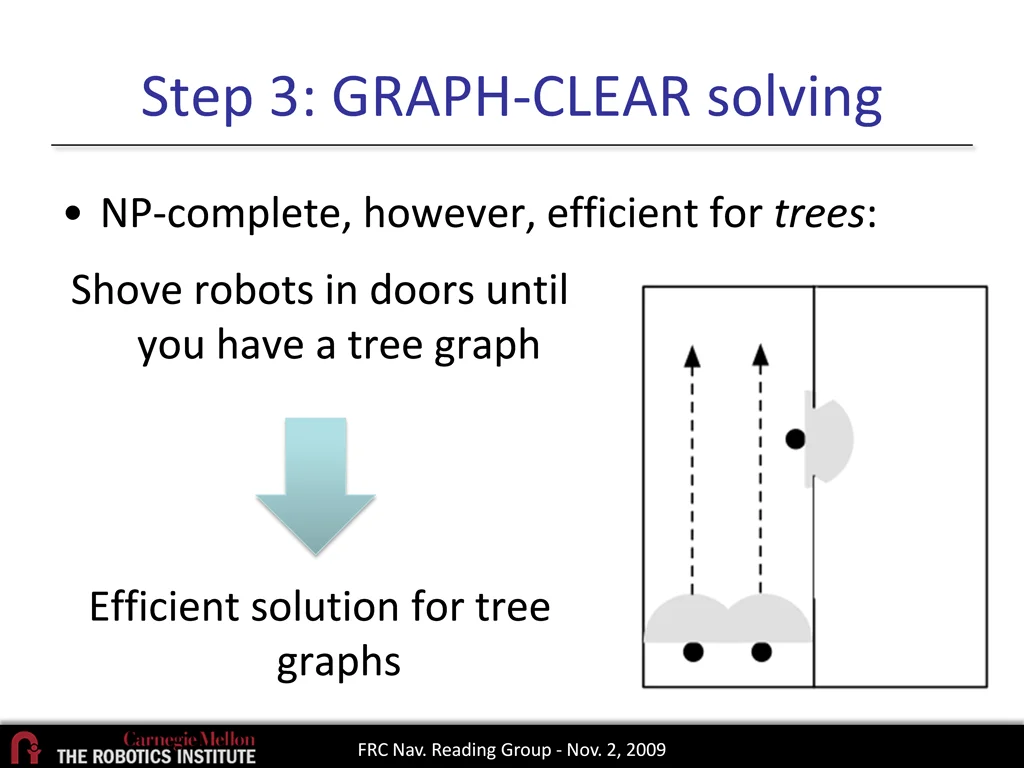
Step 3: GRAPH-CLEAR solving • NP-complete, however, efficient for trees: Shove robots in doors until you have a tree graph Efficient solution for tree graphs FRC Nav. Reading Group - Nov. 2, 2009
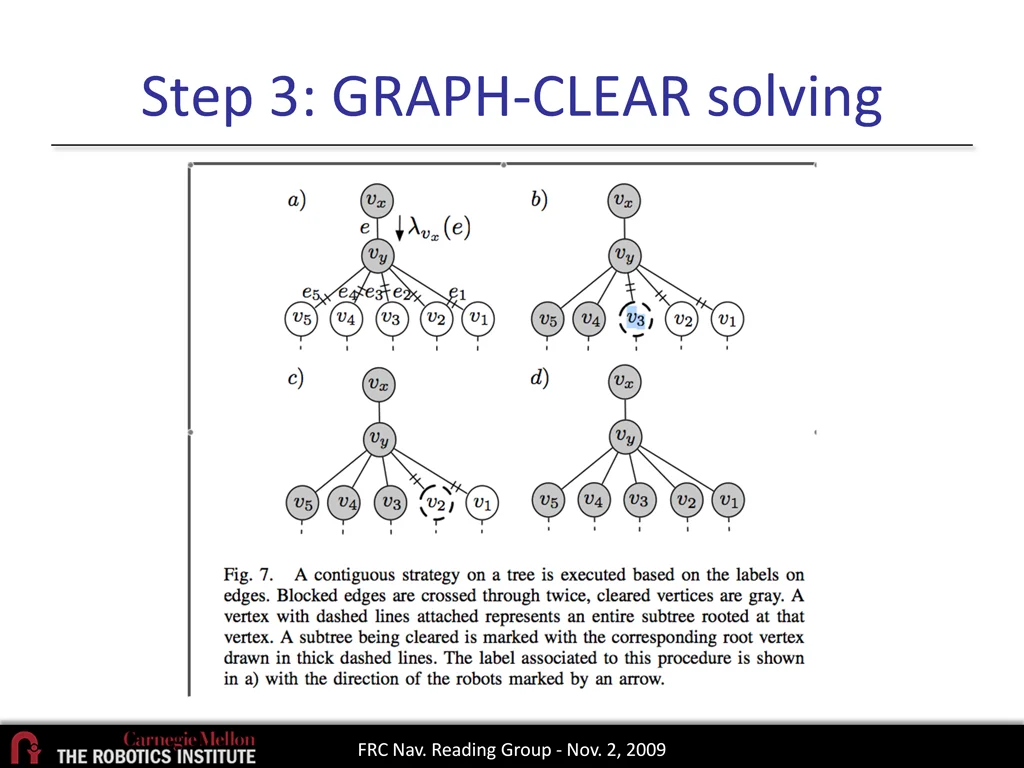
Step 3: GRAPH-CLEAR solving • Tree solution overview: 1. Compute bidirectional labels for each edge (Labels represent the cost of clearing the subtree on the other side of the edge, if the source node is already cleared) 2. Find lowest cost label 3. Start clearing tree from that label FRC Nav. Reading Group - Nov. 2, 2009
Step 3: GRAPH-CLEAR solving FRC Nav. Reading Group - Nov. 2, 2009
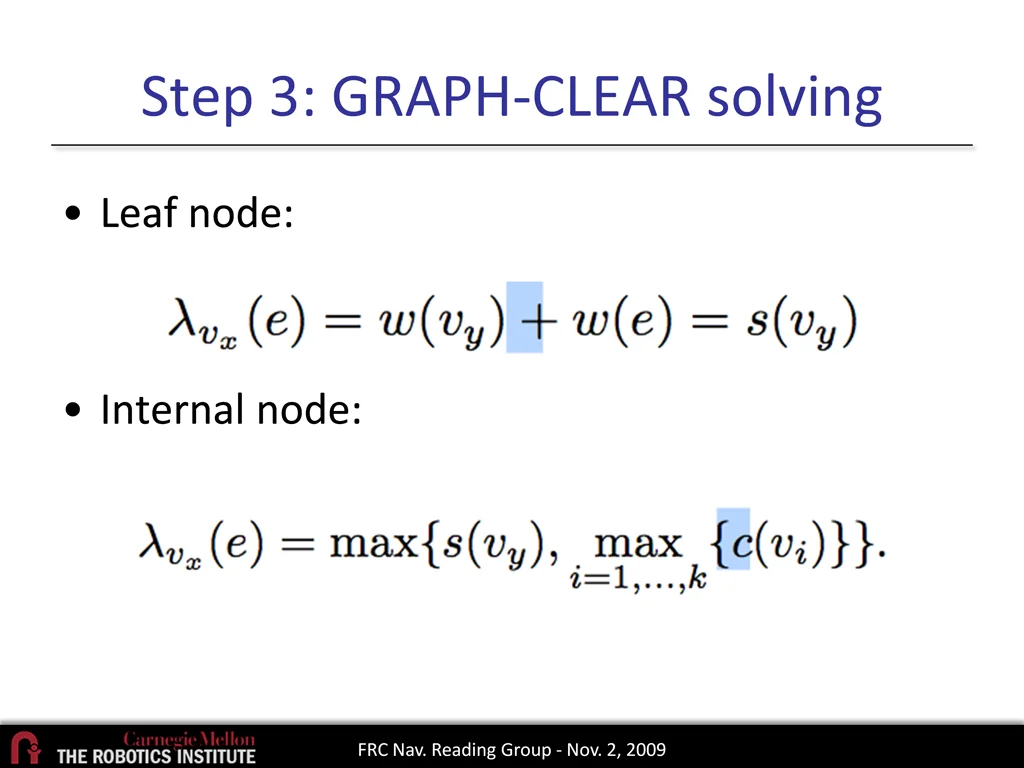
Step 3: GRAPH-CLEAR solving • Leaf node: • Internal node: FRC Nav. Reading Group - Nov. 2, 2009
Step 3: GRAPH-CLEAR solving • Actually, there is an optimal O(n2) algorithm – Compute cuts on the graph for cleared vertices – Subdivide the problem into that of solving the clearing problem for each subtree FRC Nav. Reading Group - Nov. 2, 2009
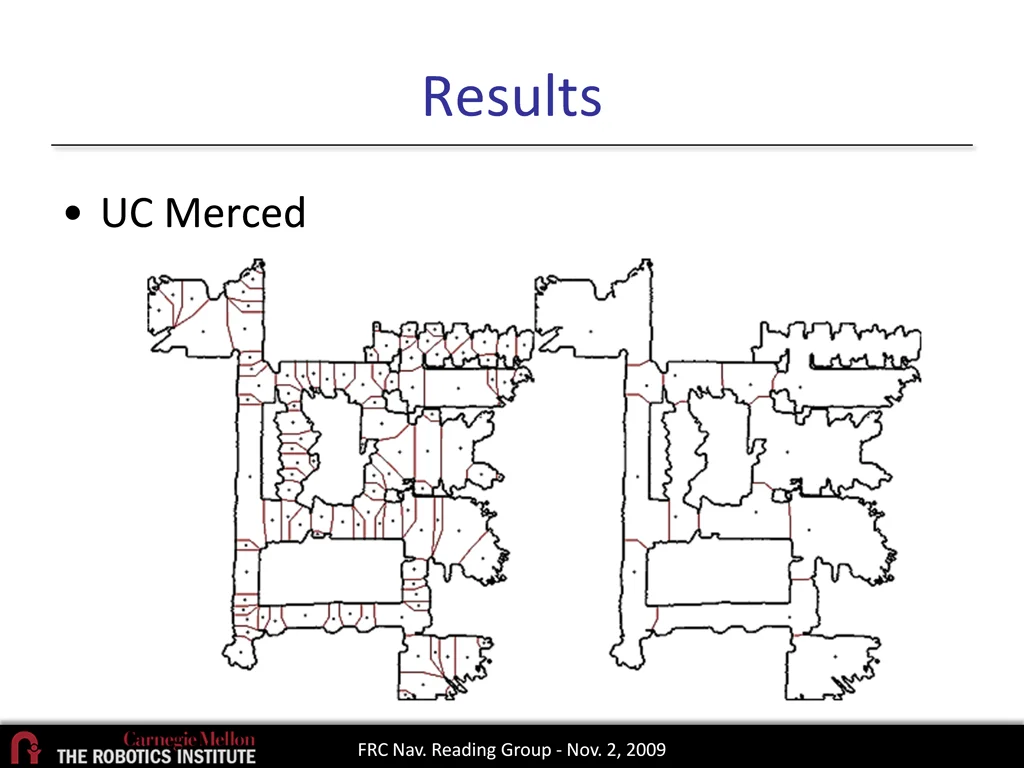
Results • UC Merced FRC Nav. Reading Group - Nov. 2, 2009
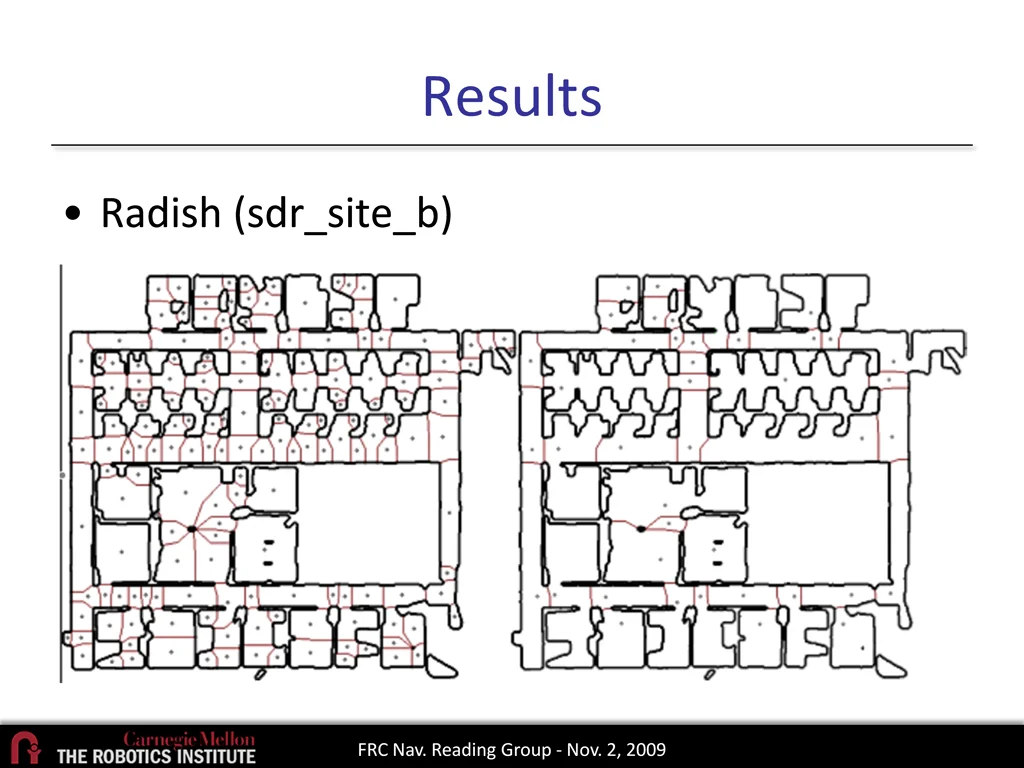
Results • Radish (sdr_site_b) FRC Nav. Reading Group - Nov. 2, 2009
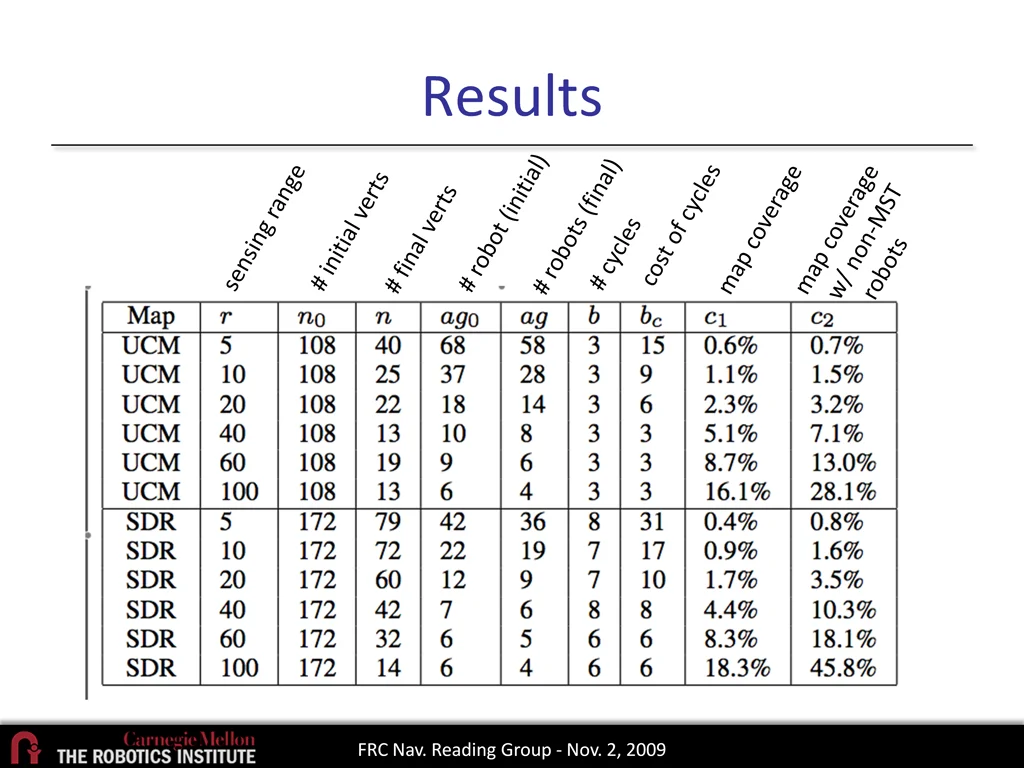
Results FRC Nav. Reading Group - Nov. 2, 2009
Conclusion • GRAPH-CLEAR is applicable to real-world problems • Can construct efficient surveillance graphs using simple methods • Future work – Probabilistic variants – Local optimizations in search patterns FRC Nav. Reading Group - Nov. 2, 2009