Download
1 / 27
270 likes | 524 Views
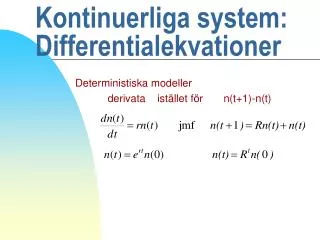
Kontinuerliga system: Differentialekvationer. Deterministiska modeller derivata istället för n(t+1)-n(t). Bestämma ekvationen. Bestäm vad som påverkar systemet Bestäm om parametrarna är positiva eller negativa, dvs ger tillväxt eller reduktion

E N D
Kontinuerliga system: Differentialekvationer Deterministiska modeller derivata istället för n(t+1)-n(t)
Bestämma ekvationen • Bestäm vad som påverkar systemet • Bestäm om parametrarna är positiva eller negativa, dvs ger tillväxt eller reduktion • Bestäm om respektive parameter är linjär eller ickelinjär rx Population x tillväxt -dx bx Population x ‘dödslar’ födsel immigration i
Bestämma ekvationen rx Population x • Vad påverkar systemet: tecken, konstant, linjär eller ickelinjär: rx, positiv, linjär • Vad påverkar systemet: tecken, konstant, linjär eller ickelinjär: bx, positiv, linjär dx, negativ, linjäri, positiv, konstant tillväxt -dx bx Population x ‘dödslar’ födsel immigration i
Differentialekvationer, del 2 • Geometrisk analys • Ickelinjära differentialekvationer
Vad är differentialekvationer • Derivator i en ekvation, dvs både y och y’ i samma ekvation • Exempel: Både koncentration och förändring av koncentrationen • För att lösa detta så måste man integrera på något sätt, dvs göra om y’ till y. • De flesta differentialekvationer går ej att lösa analytiskt, hänvisad till numeriska lösningar
Geometrisk analys: studera fasplanet Derivatan, y’, är positiv på intervallet [0,K] y’ • Faslinje diagram: • avsätt y’ mot y • y’=f(y) y K • Fasplanet: system av 2 diff ekvationer, x och y • avsätt y mot x då y’=0, x’=0 • y’=f(y,x)=0 => y=h(x)x’=g(y,x)=0 => x=i(x) y x’=0 x y’=0 Pilarna anger om x’ resp y’ är positiv eller negativ, riktning på lösningen
Utveckling av logistisk modell: allee effekt dn/dt Allee effekt, dvs finns en tröskel, a, under vilken tätheten är för låg: tredjegradsekvation n a K
Utveckling av logistisk modell: -logistisk termen gör att man kan förändra formen på y’, dvs gör att tillväxten ökar eller minskar snabbare med ändring av populationsstorlek =3 n’ =1 =0.5 n K =1 ger den vanliga logistiska ekvationen
Fasplan, system ickelinjär ekvation y’=0 y x’=0 x [t,y]=ode45('fasplan',[0 10],[0.01 0.01]); » plot(y(:,2),y(:,1))
Skörd: uttag ur population h’’x • Skörd ur population med logistisk tillväxt • y’ - yield, dvs uttag • h - skördeanträngning • uttaget ökar med ökad skördeanträngning till linjen passerat max och från h’’ avtar uttaget med ansträngning • x’ x’’ är populationens jämvikt vid resp skördeanträngning dy/dx h’x y’’ y’ x x’’ x’ K
h’’x dx/dt h’x y’’ y’ x x’’ x’ K Skörd: uttag ur population Hur ökar uttaget med h, dvs med ansträngning?
h’’x dn/dt h’x n ej jämvikt Skörd: uttag ur population • med en population som har alle effekt • beroende på täthet kan resultatet bli antingen utrotning eller jämvikt, h’ • vi för högt uttag, ansträngning, så utrotas populationen, h’’ a K
Linjärisering kring jämviktspunkt linjarisera systemet kring en punkt , dvs tag fram tangenten vid punkten bestäm alltså partiella derivatorna i punkten
Linjärisering kring jämviktspunkt linjärisera systemet kring en jämviktspunkt , dvs då f(x’,y’)=0 och g(x’,y’)=0, flytta punkten till origo dvs u=x-x’ och v=y-y’
Linjärisering kring jämviktspunkt, typ av jämvikt s 260, avgör egenskaperna för det linjära systemet, dvs egenvärdena Jacobian matris
Klassiska Rovdjur-byte modell (Lotka-Volterra) • Enklaste ickelinjära systemet av diff ekv • termen xy finns x-byte, y-Rovdjura- tillväxt byte b-fångst effektivitet c-omsätt fångat byte till avkomma d-dödshastighet predator
x-byte, y-Rovdjura- tillväxt byte b-fångst effektivitet c-omsätt fångat byte till avkomma d-dödshastighet predator
De flesta ekvationer kan approximeras med linjära funktioner inom ett litet intervall • Ekvationer som är deriverbara, dvs är kontinuerliga inom intervall, kan approximeras med Taylorutveckling. • Dess första term är linjär och därmed är det möjligt att approximera • Intervallet är mindre ju större derivatan är inom området
Numeriska lösningar • De flesta diffentialekvationer går ej att lösa analytiskt. • Man får bestämma sin lösning m h a numeriska metoder • Eulers metod är att göra om diff ekv till differens ekvation med lämplig steglängd • Mer raffinerade metoder, som Runge Kutta, utnyttjar ett antal derivator vid resp punkt. På detta sätt förbättras riktningen, dvs värdet vid nästa steg
Matlab: Numeriska lösningar • [t,y] =ode45(’funktion',tidsintervall,begynnelsevärden); Skapa en m-fil rigid.m function dy = rigid(t,y) dy = zeros(3,1); % a column vector dy(1) = y(2) * y(3); dy(2) = -y(1) * y(3); dy(3) = -0.51 * y(1) * y(2); lös ekvationen på intervallet 0-12 • [t,y] = ode45('rigid',[0 12],[0 1 1])
Matlab: Numeriska lösningar • [t,y] = ode45('rigid',[0 12],[0 1 1]) • plot(t,y(:,1),'-',t,y(:,2),'-.',t,y(:,3),'.') • Gör om rigid.m och pröva olika ekvationer • Vissa typer av diff ekvationer, s k styva ekvationer, bör lösas med t ex ode15s(…) • Styva diff ekvationer
Kontinuerliga system: Differentialekvationer Deterministiska modeller derivata istället för n(t+1)-n(t)
Bestämma ekvationen • Bestäm vad som påverkar systemet • Bestäm om parametrarna är positiva eller negativa, dvs ger tillväxt eller reduktion • Bestäm om respektive parameter är linjär eller ickelinjär rx Population x tillväxt -dx bx Population x ‘dödslar’ födsel immigration i
Bestämma ekvationen rx Population x • Vad påverkar systemet: tecken, konstant, linjär eller ickelinjär: rx, positiv, linjär • Vad påverkar systemet: tecken, konstant, linjär eller ickelinjär: bx, positiv, linjär dx, negativ, linjäri, positiv, konstant tillväxt -dx bx Population x ‘dödslar’ födsel immigration i
Differentialekvationer, del 1 • Linjära differentialekvationer • Separabla ekvationer • System av linjära differentialekvationer kap 5.1-2 • Använda numeriska metoder kap 5.4
Vad är differentialekvationer • Derivator i en ekvation, dvs både y och y’ i samma ekvation • Exempel: Både koncentration och förändring av koncentrationen • För att lösa detta så måste man integrera på något sätt, dvs göra om y’ till y. • De flesta differentialekvationer går ej att lösa analytiskt, hänvisad till numeriska lösningar