Understanding Matrix Operators: Rotation and Transformation in 3D Space
This document explores the concepts of matrix operators, specifically focusing on rotation and transformation matrices in three-dimensional space. It covers the mathematical principles underlying these operations, including the formulas for rotating points and the general transformation matrix. The document details how to manipulate matrices to achieve various rotations about the x, y, and z axes, as well as the significance of angle measures. Through examples, it illustrates the application of these transformations and the resulting changes in coordinates.

Understanding Matrix Operators: Rotation and Transformation in 3D Space
E N D
Presentation Transcript
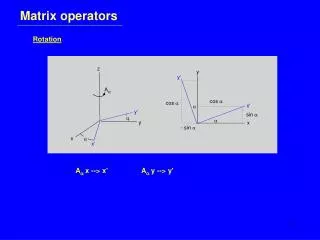
Matrix operators Rotation z y y' Aa cos a cos a x' a y' sin a a a y x - sin a x a x' Aa x --> x' Aa y --> y'
Matrix operators Rotation z y y' Aa cos a cos a x' a y' sin a a a y x - sin a x a x' Aa x --> x' Aa y --> y' x' = x cos a + y sin a y' = - x sin a + y cos a z' = z
Matrix operators Rotation z y y' Aa cos a cos a x' a y' sin a a a y x - sin a x a x' x' = x cos a + y sin a x' cos a sin a 0 x y' = - x sin a + y cos a y' = – sin a cos a 0 y z' = z z' 0 0 1 z X' = AaX
Matrix operators Rotation of a point y x’ y’ z’ x y z a x Rotation of point same asx' cos a – sin a 0 x leaving point fixed &y' = sin a cos a 0 y rotating coord. system z' 0 0 1 z through angle –a X' = AaX = AaX -1 T
Matrix operators General transformation matrix x3 x3’ r = (r i)i + (r j)j+ (r k)k r = (r i')i' + (r j')j'+ (r k')k' If r = i', j', k', in turn: i' = (i' i)i + (i' j)j+ (i' k)k j'= (j' i)i + (j' j)j+ (j' k)k k'= (k' i)i + (k' j)j+ (k' k)k x’ y’ z’ x y z r x2’ x2 x1 x1’
Matrix operators General transformation matrix x3 x3’ If r = i', j', k', in turn: i' = (i' i)i + (i' j)j+ (i' k)k j'= (j' i)i + (j' j)j+ (j' k)k k'= (k' i)i + (k' j)j+ (k' k)k (i' i), (i' j), ….. are direction cosines lmn = cos qmn, and: i' l11 l12l13i j' = l21 l22l23j k' l31 l32l33k x’ y’ z’ x y z r x2’ x2 x1 x1’
Matrix operators General transformation matrix (i' i), (i' j), ….. are direction cosines lmn = cos qmn, and: i' l11 l12l13i j' = l21 l22l23j k' l31 l32l33k x l11 l12l13 x' x' l11 l21l31 x y = l21 l22l23 y' y' = l12 l22l32 y z l31 l32l33 z' z' l13 l23l33 z
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X X3 ––> r = A 2. rotate a about r = R 3. r ––> X3' = A-1 x3 x3’ x’ y’ z’ x y z r x2’ x2 x1 x1’
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P = l11 l21 l31 cos a sin a 0 l11 l12 l13 l12 l22 l32 -sin a cos a 0 l21 l22 l23 l13 l23 l33 0 0 1 l31 l32 l33
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P = l11 l21 l31 cos a sin a 0 l11 l12 l13 l12 l22 l32 -sin a cos a 0 l21 l22 l23 l13 l23 l33 0 0 1 l31 l32 l33 Multiplying matrices, finally get P = l31(1 - cos a) + cos a l32l31 (1 - cos a) + l33 sin a l31l33 (1 - cos a) - l32 sin a l32l31 (1 - cos a) - l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) + l31 sin a l33l31 (1 - cos a) + l32 sin a l32l33 (1 - cos a) - l31 sin a l33(1 - cos a) + cos a 2 2 2
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P = l31(1 - cos a) + cos a l32l31 (1 - cos a) + l33 sin a l31l33 (1 - cos a) - l32 sin a l32l31 (1 - cos a) - l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) + l31 sin a l33l31 (1 - cos a) + l32 sin a l32l33 (1 - cos a) - l31 sin a l33(1 - cos a) + cos a This matrix for rotation of basis vectors. More interesting to rotate points (xyz). Use inverse (transpose) matrix: P-1 = l31(1 - cos a) + cos a l32l31 (1 - cos a) - l33 sin a l33l31 (1 - cos a) + l32 sin a l32l31 (1 - cos a) + l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) - l31 sin a l31l33 (1 - cos a) - l32 sin a l 32l33 (1 - cos a) + l31 sin a l33(1 - cos a) + cos a 2 2 2 2 2 2
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P-1 = l31(1 - cos a) + cos a l32l31 (1 - cos a) - l33 sin a l33l31 (1 - cos a) + l32 sin a l32l31 (1 - cos a) + l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) - l31 sin a l31l33 (1 - cos a) - l32 sin a l 32l33 (1 - cos a) + l31 sin a l33(1 - cos a) + cos a Ex: r along z l31 = l32 = 0 l33 = 1 P-1 = cos a – sin a 0 sin a cos a 0 0 0 1 2 2 2
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P-1 = l31(1 - cos a) + cos a l32l31 (1 - cos a) - l33 sin a l33l31 (1 - cos a) + l32 sin a l32l31 (1 - cos a) + l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) - l31 sin a l31l33 (1 - cos a) - l32 sin a l 32l33 (1 - cos a) + l31 sin a l33(1 - cos a) + cos a Ex: C4 along [100] l33 = l32 = 0 l31 = 1 a = π/2 cos a = 0 sin a = 1 P-1 = 1(1-0)+0 0(1-0)-0(1) 0(1-0)+0(1) = 1 0 0 0(1-0)+0(1) 0(1-0)+0 0(1-0)-1(1) 0 0 -1 0(1-0)+0(1) 0(1-0)+1(1) 0(1-0)+0 0 1 0 (x', y', z') = (x, -z, y) 2 2 2
Matrix operators General transformation matrix Transformation matrix is then product of 3 matrices: P = A-1R A where X' = P X P-1 = l31(1 - cos a) + cos a l32l31 (1 - cos a) - l33 sin a l33l31 (1 - cos a) + l32 sin a l32l31 (1 - cos a) + l33 sin a l32(1 - cos a) + cos a l32l33 (1 - cos a) - l31 sin a l31l33 (1 - cos a) - l32 sin a l 32l33 (1 - cos a) + l31 sin a l33(1 - cos a) + cos a Ex: C3 along [111] l33 = l32 = l31 = 1/ 3 a = 2π/3 cos a = -1/2 sin a = 3/2 P-1 = 1/3(3/2)-1/2 1/3(3/2)-1/2 1/3(3/2)+1/2 = 0 0 1 1/3(3/2)+1/2 1/3(3/2)-1/2 1/3(3/2)-1/2) 1 0 0 1/3(3/2)-1/2 1/3(3/2)+1/2 1/3(3/2)-1/2 0 1 0 (x', y', z') = (z, x, y) 2 2 2
Matrix operators Unit cell transformations Transformation of unit cell transforms: (hkl) reciprocal cell basis vectors zone axes [uvw] atom position coordinates
Matrix operators Unit cell transformations Transformation of unit cell transforms: (hkl) reciprocal cell basis vectors zone axes [uvw] atom position coordinates Suppose a2 = s11a1+ s12b1 + s13c1 b2 = s21a1+ s22b1 + s23c1 c2 = s31a1+ s32b1 + s33c1 sij also transforms (hkl) to the new basis a2, b2, c2 But a2i* = ((sij)-1)Ta1i* <–– [uvw] & (xyz) transform the same way
Matrix operators Unit cell transformations a2 = s11 s12 s13 a1 b2 s21 s22 s23 b1 c2 s31 s32 s33 c1 Ex: F cubic ––> P cell aP = 1/2 1/2 0 aF bP0 1/2 1/2 bF cP1/2 0 1/2cF cF bP cP bF aP aF
Matrix operators Unit cell transformations a2 = s11 s12 s13 a1 b2 s21 s22 s23 b1 c2 s31 s32 s33 c1 Ex: F cubic ––> P cell aP = 1/2 1/2 0 aF bP0 1/2 1/2 bF cP1/2 0 1/2cF Typical F cubic diffraction pattern: (111), (200), (220) ….. (111), (101), (211) for P cell cF bP cP bF aP aF