Download
1 / 62
620 likes | 760 Views
What is the Region Occupied by a Set of Points?. Antony Galton University of Exeter, UK Matt Duckham University of Melbourne, Australia. The General Problem.

E N D
What is the Region Occupied by a Set of Points? Antony Galton University of Exeter, UK Matt Duckham University of Melbourne, Australia
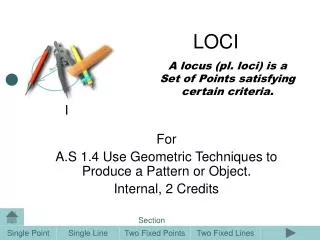
The General Problem To assign a region to a set of points, in order to represent the location or configuration of the points as an aggregate, abstracting away from the individual points themselves.
Questions about method • How easily can the method be generalised to three (or more) dimensions? • What is the computational complexity of the algorithm?
Other criteria • Perceptual • Cognitive • Aesthetic • … We do not consider these!
Edelsbrunner’s a-shape • H. Edelsprunner, D. Kirkpatrick and R. Seidel, ‘On the Shape of a Set of Points in the Plane’, IEEE Transactions on Information Theory, 1983.
A-Shape • M. Melkemi and M. Djebali, ‘Computing the shape of a planar points set’, Pattern Recognition, 2000.
DSAM Method • H. Alani, C. B. Jones and D. Tudhope,‘Voronoi-based region approximation for geographical information retrieval with gazeteers’, IJGIS, 2001
Properties of footprints obtained by the swinging arm method • No outliers • Points on the boundary • May be topologically non-regular • May be disconnected • Always polygonal (possibly degenerate) • May have large empty spaces • May have non-Jordan boundary
Properties of the swinging arm method • Does not generalise straightforwardly to 3D (must use a ‘swinging flap’). • Complexity could be as high as O(n3). • Essentially the same results can be obtained by the ‘close pairs’ method (see paper).