Download
1 / 10
110 likes | 949 Views
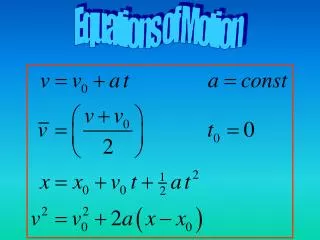
The Big 3 Equations of Motion. We have three equations that can be used to solve most Problems, when dealing with translational (tangential) motion. These are the “Big 3 Equations of Motion”. Pos f = Pos i + V i t + (1/2)at 2. V f = V i + at. V f 2 = V i 2 + 2a(Pos f – Pos i ).

E N D
The Big 3 Equations of Motion We have three equations that can be used to solve most Problems, when dealing with translational (tangential) motion. These are the “Big 3 Equations of Motion” Posf = Posi + Vit + (1/2)at2 Vf = Vi + at Vf2 = Vi2 + 2a(Posf – Posi) Important note: For the tangential motion around the disk the change in tangential position is actually the distance traveled. So if a disk rotates once, the change in tangential position is 1 circumference, even though the change in the Cartesian position is zero.
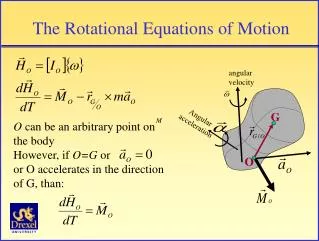
If there are these equations that can be used to describe the translational motion of a disk, so are there also similar equations to describe the rotational motion of the disk as well? Rotational motion equations? 1st we know the equations are only mathematical representations of the relationships between position, velocity, acceleration, and time 2nd we no the relationships between position, velocity, acceleration and time do NOT change when move from a linear system, tangential system, a rotational system, or any other system you can think of. So logically the answer is yes, there should be very similar equations
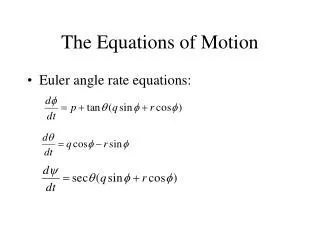
The logical Angular position equation We can start with our linear position equation Posf = Posi + Vit + (1/2)at2 Which says: End Position = Start position + start velocity * time + half the acceleration * time squared End angular Position = Start angular position + start angular velocity * time + half the angular acceleration * time squared qf= qi+ wit + (1/2)at2
The logical Angular velocity We can start with our linear velocity equation Vf = Vi + at Which says: End velocity = Start velocity + acceleration * time End angular velocity = Start angular velocity + angular acceleration * time wf= wi+ at
The logical time independent equation We can start with our linear time independent equation Vf2 = Vi2 + 2a(Posf – Posi) Which says: end speed squared = start speed squared + twice the acceleration* the displacement ending angular speed squared = starting angular speed squared + twice the angular acceleration* the angular displacement wf2= wi2+ 2a(qf– qi)
Although logic is a powerful thought process, it does not always work (often due to our limitations, and assumptions) and needs to be validated. Testing the logic To test our logic we can use the our tangential kinematic equations and the equations that relate tangential motion to rotational motion S= Pos = qr Posf = Posi + Vit + (1/2)at2 v = wr Vf = Vi + at a = ar Vf2 = Vi2 + 2a(Posf – Posi)
Posf = Posi + Vit + (1/2)at2 Sf= Si+ Vit + (1/2)at2 v = wr S = qr a = ar [qfr]= [qir] + [wr]t + (1/2)[ar]t2 [qf] = [qi] + [w]t + (1/2)[a]t2
Vf = Vi + at Vf = Vi + at v = wr a = ar [wfr]= [wir]+ [ar]t [wf ]= [wi ]+ [a]t
Vf2 = Vi2 + 2a(Posf – Posi) Vf2 = Vi2 + 2a(Posf – Posi) a = ar v =wr S= Pos = qr [wfr]2= [wir]2+ 2[ar]([qfr]– [qir]) wf2r2= wi2r2+ 2ar2(qf – qi) wf2= wi2+ 2a(qf – qi)
Validation So in the end the kinematic equations for rotational motion are in essence the same equations that we have always worked with for translational (tangential motion) Translational/ Tangential Motion Rotational Motion Position equation Posf = Posi + Vit + (1/2)at2 [qf] = [qi] + [w]t + (1/2)[a]t2 Velocity equation Vf = Vi + at [wf ]= [wi ]+ [a]t Time independent equation Vf2 = Vi2 + 2a(Posf – Posi) wf2= wi2+ 2a(qf – qi)