Download
1 / 1
10 likes | 134 Views
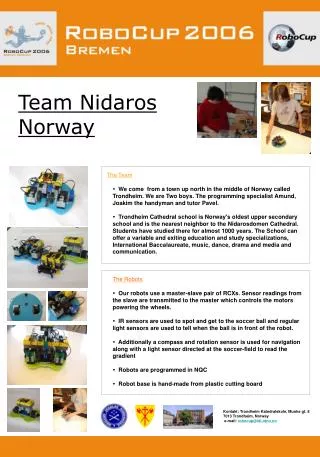
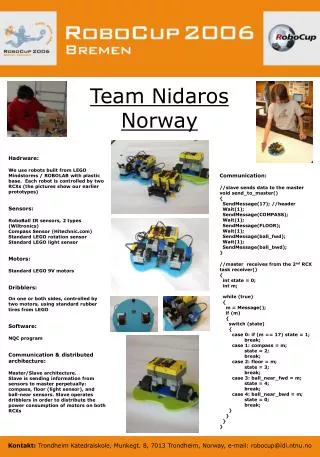
Team Nidaros from Norway specializes in creating advanced robots using LEGO Mindstorms and ROBOLAB. Our unique designs feature RCXs controlling multiple sensors including IR, compass, and light sensors. Each robot runs on a master/slave architecture that optimizes power consumption through efficient communication. Our dribblers, powered by standard LEGO 9V motors with rubber tires, enhance our robots' mobility and performance. Get in touch with us at Trondheim Katedralskole for collaboration or inquiries.

E N D
Team Nidaros Norway Hadrware: We use robots built from LEGO Mindstorms / ROBOLAB with plastic base. Each robot is controlled by two RCXs (the pictures show our earlier prototypes) Sensors: RoboBall IR sensors, 2 types (Wiltronics) Compass Sensor (Hitechnic.com) Standard LEGO rotation sensor Standard LEGO light sensor Motors: Standard LEGO 9V motors Dribblers: On one or both sides, controlled by two motors, using standard rubber tires from LEGO Software: NQC program Communication & distributed architecture: Master/Slave architecture. Slave is sending information from sensors to master perpetually: compass, floor (light sensor), and ball-near sensors. Slave operates dribblers in order to distribute the power consumption of motors on both RCXs Communication: //slave sends data to the master void send_to_master() { SendMessage(17); //header Wait(1); SendMessage(COMPASS); Wait(1); SendMessage(FLOOR); Wait(1); SendMessage(ball_fwd); Wait(1); SendMessage(ball_bwd); } //master receives from the 2nd RCX task receiver() { int state = 0; int m; while (true) { m = Message(); if (m) { switch (state) { case 0: if (m == 17) state = 1; break; case 1: compass = m; state = 2; break; case 2: floor = m; state = 3; break; case 3: ball_near_fwd = m; state = 4; break; case 4: ball_near_bwd = m; state = 0; break; } } } } Kontakt: Trondheim Katedralskole, Munkegt. 8, 7013 Trondheim, Norway, e-mail: robocup@idi.ntnu.no