Download
1 / 29
290 likes | 461 Views
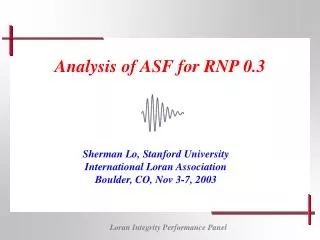
Analysis of ASF for RNP 0.3. Sherman Lo, Stanford University International Loran Association Boulder, CO, Nov 3-7, 2003. Additional Secondary Factor (ASF) Delay in propagation time due to traversing heterogeneous earth relative to sea water path Major source of error for Loran navigation.

E N D
Analysis of ASF for RNP 0.3 Sherman Lo, Stanford University International Loran Association Boulder, CO, Nov 3-7, 2003
Additional Secondary Factor (ASF) Delay in propagation time due to traversing heterogeneous earth relative to sea water path Major source of error for Loran navigation Why are we studying this? Need to understand effects of ASF to meet aviation requirements Integrity: Bound the worst case Haven’t we been here before? Hasn’t this been studied before? Additional Secondary Factors
HAL Aviation Requirements • Integrity: Does our protection level bound position error • Requirement: 99.99999% (1-10-7) HPL • Availability: How often is the solution valid for RNP 0.3 • Requirement: > 99.9% (HAL = 556 m) • Continuity: Is solution available for entire approach if initially available • Requirement: > 99.9% (150 sec)
Calculating HPL • ai is the standard deviation of a normal distribution that overbounds the randomly distributed errors • SNR, transmitter jitter • bi an overbound for the correlated bias terms • Correlated temporal ASF • gi an overbound for the uncorrelated bias terms • Uncorrelated ASF temporal errors, ASF spatial error • PB is a position domain overbound • ASF spatial error
Q s1 ECD1 s2 ECD2 s3 ECD3 s4 ECD4 s5 ECD5 s6 ECD6 s7 ECD7 s8 ECD8 sN ECDN Temporal & Spatial Effects • ASF is modeled in two components: temporal & spatial. • ECD is can be modeled similarly though with other components (transmitter effects, etc.) Varies temporally Varies spatially
Variation of ASF At Aircraft Location User ASF will differ from provided ASF Average ASF Value At Calibration Point xo Provided Difference from rx ASF from seasonal changes Difference from rx ASF from using a different location ASF used by receiver (rx ASF) • User has an average ASF • ASF look up table is to be provided to user (at each calibration pt)
One Important Concept … • Assumption: Time of Transmission (TOT) • Eliminate effect of SAM • Otherwise SAM induced changes need to be accounted for when using TOA • TOT control eliminates a potential source of error • While the SAM may reduce the actual error, since we do not know its effects, we have to assume it does not TOT aids in reducing bound on ASF Results in better availability, continuity
TOT Master TOT Monitor Spatial ASF TOA Monitor TOA Monitor Spatial ASF Data Collection • TOA and TOT monitors; FAATC/JJMA/USCGA flight tests • USCG data from transmitters, SAM (TINO, etc.)
Temporal ASF Model ASFN,mean = mean ASF used by the receiver DTOAN(t) is the TOA relative to the nominal for the Nth signal (transmitter) at time t dN,land are the relative amplitudes for the time varying components depending on distance (initially assumed known) dTOA(t) are the common time varying components that have different amplitudes for different signals (propagation) c(t) are the common time varying components that have the same amplitudes for different signals (mainly clock error) eN(t) are what remains after taking out the correlated part of the TOAs (residual error)
Monitor Data Raw Data “Decimated” Data
Modeling at Sandy Hook (Not Using Caribou) dTOA(t) c(t) emax eCar(t)
Modeling at Sandy Hook (Not Using Nantucket) dTOA(t) c(t) emax eNan(t)
Conclusions on Temporal ASF • Bound on Temporal ASF Variations is a significant factor in the HPL • Should be worst in NEUS • Important to divide temporal ASF into correlated and uncorrelated contributions • Correlated error does not need to be treated in the worst possible manner • Current values used (NEUS) • 1000 ns/Mm (correlated) • 300 ns (uncorrelated) • Are these values adequate for integrity? • Can we do better with another model?
Spatial ASF – Cape Elizabeth from Nantucket (D. Last, P. Williams)
Comparison of Spatial ASF Data vs. Model (G. Johnson) • Greg Johnson will present more about this next!
Conclusions on Spatial ASF • Bound on Spatial ASF Variations is a significant factor in the HPL • Should be worst in mountainous and coastal regions • Position Domain Bound used • Allows the incorporation of correlation • Limits allowable station sets • Current values used • 120 m (PD) for interior • Good for up to 20 km with 1-2 station(s) missing • How much an inflation factor is necessary?
Availability & Continuity • Bound on ASF variations allows calculation of HPL • Need bound for noise, transmitter error • Availability occurs when: • Pass Cycle Resolution Test • HPL < HAL (556 meter) • Continuity occurs when: • Initially Available • Available over next 150 seconds
Caveats • Models dependent on many assumed values • Errors (ASF, tx, noise) • Noise • Algorithm (Cycle, etc.) • Station availability • Need to aggregate for all scenarios • interference, early skywave, different noise levels • Only one case shown: 99% noise level, etc. • Weighted by assumed regional ASF variations, etc. RESULTS SHOWN ARE NOT FINAL NOR NECESSARILY REPRESENTATIVE
Conclusions … • Need to bound ASF – largest error source • TOT reduces error to be bounded • Separate ASF into temporal & spatial • Temporal ASF • Separate into correlated & uncorrelated terms • Spatial ASF • Use position bound • Bounds can be very high on coast, mountain • Have tools in place so that once we have results for all hazards, the continuity and availability can be quickly determined • Story is not complete – more to come
Acknowledgements • Federal Aviation Administration • Mitch Narins – Program Manager • Contributors • Bob Wenzel, Ben Peterson • Prof. David Last, Paul Williams • Greg Johnson, CAPT Richard Hartnett, FAATC • LT Dave Fowler, LT Kirk Montgomery • The views expressed herein are those of the presenter and are not to be construed as official or reflecting the views of the U.S. Coast Guard, Federal Aviation Administration, or Department of Transportation .