Download
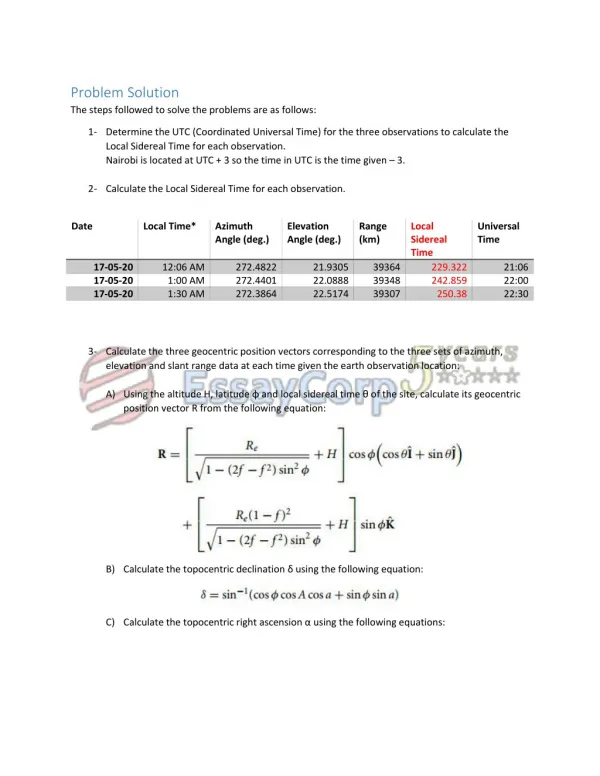
1 / 45
450 likes | 641 Views
Sub-Optimal Solutions for Satellite Orbital Transfers 6th International Workshop and Advanced School " Spaceflight Dynamics and Control ". Antonio Fernando Bertachini de Almeida Prado Division of Space Mechanics and Control – INPE

E N D
Sub-Optimal Solutions for Satellite Orbital Transfers 6th International Workshop andAdvancedSchool "Spaceflight Dynamics andControl" Antonio Fernando Bertachini de Almeida Prado Division of Space Mechanics and Control– INPE C.P. 515, 12227-310 São José dos Campos - SP, Brasil prado@dem.inpe.br
INTRODUCTION The idea of the present research is to study low thrust maneuvers for a satellite that needs to escape from a collision with a cloud of particles. The cloud of particles is assumed to come from a close approach with a celestial body, that causes a dispersion of particles. So, we first study the orbital behavior of the cloud to define an orbit that is safe and than we optimize transfers to achieve this safe orbit. Sub-optimal control will be used to complete this task.
INTRODUCTION To study the orbit of the cloud we use analytical equations for the variations of velocity, energy, angular momentum and inclination for a spacecraft that passes close to a celestial body. This passage is assumed to be performed around the secondary body of the system. In 2D:
It is assumed that the system has three bodies: a primary (M1) and a secondary (M2) bodies with finite masses that are in circular orbits around their common center of mass and a third body with negligible mass. In 3D: Swing-byof a SingleParticle
It is assumed that all the particles that belong to the cloud have similar orbital elements before the close approach, with a small difference from each member of the cloud, that will be varied in a short interval to represent the group of particles. Wethen study the change of the relative orbital elements of the orbits of this cloud of particles after the close approach with the planet, as well as the variations in velocity, energy and angular momentum. Extension to a CloudofParticles
The following five variables are used to define one trajectory: Vp, the velocity of the spacecraft at periapsis; Two angles ( and ), that specify the direction of the periapsis; rp the periapsis distance; g, the angle between the velocity vector at periapsis and the intersection between the horizontal plane that passes by the periapsis and the plane perpendicular to the periapsis that holds . Variablesthat Define anOrbit
ANALYTICAL EQUATIONS FOR FHE SWING-BY IN 3 DIMENSIONS First, it is calculated the initial conditions with respect to M2 at the periapsis: Position: Velocity:
ANALYTICAL EQUATIONS FOR FHE SWING-BY IN 3 DIMENSIONS
RESULTS (PLANAR CASE) Some results, for the case a = e = 0.001, rp = 1.4 RJ
RESULTS (PLANAR CASE) Some results, for the case a = e = 0.001, rp = 1.4 RJ
RESULTS (3D) Initial conditions (rp, vp, , , ) are varied and the effects of the close approach are studied. Asatellite exploded when passing by the periapsis. This position is given by = 30, = 45. Thereference value for the direction of the velocity is = 60. Two values were used for the velocity at periapsis (vp = 4.0 and vp = 4.5) and for the periapsis distance (rp = 1.5 rJ, rp = = 5.0 rJ). The vertical axis shows the difference between the value of every single particle and a reference value, assumed to be the value of the particle that remains with the nominal values of . The horizontal axis shows the value of , in radians.
Fig. 1 – Variation in Inclination (rad) for rp = 1.5 rJandvp = 4.0. Fig. 2 – Variation in Velocity for rp = 1.5 rJ and vp = 4.0. Fig. 3 – Variation in Angular momentum for rp = 1.5 rJ and vp = 4.0. Fig. 4 – Variation in Energy for rp = 1.5 rJ and vp = 4.0.
Fig. 6 – Variation in Velocity for rp = 1.5 rJ and vp = 4.5. Fig. 5 – Variation in Inclination (rad) for rp = 1.5 rJ and vp = 4.5. Fig. 8 – Variation in Energy for rp = 1.5 rJ and vp = 4.5. Fig. 7 – Variation in Angular momentum for rp = 1.5 rJ and vp = 4.5.
Fig. 10 – Variation in Velocity for rp = 5.0 rJ and vp = 4.0. Fig. 9 – Variation in Inclination (rad) for rp = 5.0 rJ and vp = 4.0. Fig. 11 – Variation in Angular momentum forrp = 5.0 rJ and vp = 4.0. Fig. 12 – Variation in Energy for rp = 5.0 rJ and vp = 4.0.
Fig. 13 – Variation in Inclination (rad) for rp = 5.0 rJ and vp = 4.5. Fig. 14 – Variation in Velocity for rp = 5.0 rJ and vp = 4.5. Fig. 15 – Variation in Angular momentum for rp = 5.0 rJ and vp = 4.5. Fig. 16 – Variation in Energy for rp = 5.0 rJ and vp = 4.5.
INTRODUCTION TO MANEUVERS The problem of spacecraft orbit control with minimum fuel consumption is considered, using low thrust maneuvers. The goal is to go to a safe orbit, obtained from the orbital evolution of the cloud of particles. A numerical suboptimal solution is tried, where the direction of the thrust is assumed to be a quadratic form function of the position of the satellite in the orbit. The main idea is to verify the effects of using a new propulsion system that is under development in Brazil (Phall 1) for a mission of this type.
ASSUMPTIONS The spacecraft is supposed to be in Keplerian motion controlled only by the thrusts, whenever they are active. This means that there are two types of motion: i) A Keplerian orbit. This motion occurs when the thrusts are not firing; ii) The motion governed by two forces: the Earth's gravity field and the force delivered by the thrusts. This motion occurs during the time the thrusts are firing.
CHARACTERISTICS OF THE THRUSTS Fixed magnitude; Constant Ejection Velocity; Constrained angular motion: the direction of the thrust is assumed to be a quadratic form function of the position of the satellite in the orbit; iv) Operation in on-off mode.
DEFINITION OF THE PROBLEM The problem is to find how to transfer the spacecraft between two orbits in such way that the fuel consumed is minimum. There is no time restriction involved here and the spacecraft can leave from any point in the initial orbit. The maneuver is performed with the use of an engine that is able to deliver a thrust with constant magnitude and constrained variable direction.
This is a typical optimal control problem: Objective Function: Mf, where Mf is the final mass of the vehicle and it has to be maximized with respect to the control u(.); Subject to: Equations of motion, constraints in the state (initial and final orbit) and control (quadratic form, limits in the angles of "pitch" and "yaw", forbidden region of thrusting and others); And given: All parameters (gravitational force field, initial values of the satellite and others).
THE NON-SINGULAR STATE X1 = [a(1-e2)/]1/2 X2 = ecos(-) X3 = esin(-) X4 = (Fuel consumed)/m0 X5 = t = time X6 = cos(i/2)cos((+)/2) X7 = sin(i/2)cos((-)/2) X8 = sin(i/2)sin((-)/2) X9 = cos(i/2)sin((+)/2) = + - s, and s is the range angle of the spacecraft
EQUATIONS OF MOTION dX1/ds= f1 = SiX1F1 dX2/ds = f2 = Si{[(Ga+1)cos(s)+X2]F1+F2sin(s)} dX3/ds = f3 = Si{[(Ga+1)sin(s)+X3]F1-F2cos(s)} dX4/ds = f4 = SiF(1-X4)/(X1W) dX5/ds = f5 = Si(1-X4)m0/X1 dX6/ds=f6 = - SiF3[X7cos(s)+X8sin(s)]/2 dX7/ds = f7 = SiF3[X6cos(s)-X9sin(s)]/2 dX8/ds = f8 = SiF3[X9cos(s)+X6sin(s)]/2 dX9/ds = f9 = SiF3[X7sin(s)-X8cos(s)]/2
EQUATIONS OF MOTION where: Ga = 1 + X2cos(s) + X3sin(s) Si = ( X14)/[Ga3m0(1-X4)] and F is the magnitude of the thrust, W is the velocity of the gases when leaving the engine, is the true anomaly of the spacecraft.
THE CONTROL A quadratic parametrization is used as an approximation for the control law (angles of pitch () and yaw ()): = 0 + ' * ( s – s0 ) + '' * ( s – s0 )2 = 0 + ' * ( s – s0 ) + '' * ( s – s0 )2 where 0, 0, ', ', '', '' are parameters to be found, s is the instantaneous range angle and s0 is the range angle when the motor is turned-on.
THE CONTROL • Considering these assumptions, there is a set of eight variables to be optimized for each burning arc: • Start and end of thrusting and; • The parameters 0, 0, ', ', '', ‘’ for each "burning arc" in the maneuver. • Note that this number of arcs is given "a priori" and it is not an "output" of the algorithm. • By using parametric optimization, this problem is reduced to one of nonlinear programming, which can be solved by several standard methods.
Numerical Method To solve the nonlinear programming problem, the gradient projection method was used. It means that at the end of the numerical integration, in each iteration, two steps are taken: i) Force the system to satisfy the constraints by updating the control function according to: where f is the vector formed by the active constraints;
Numerical Method After the constraints are satisfied, try to minimize the fuel consumed. This is done by making a step given by: where: where I is the identity matrix, d is the search direction, J is the function to be minimized (fuel consumed) and g is a parameter determined by a trial and error technique.
SOLUTIONS The solution is given in terms of the constants that specifies the control to be applied and the fuel consumed. Several numbers of "thrusting arcs" (arcs with the thrusts active) can be used for each maneuver. Instead of time, the "range angle" (the angle between the radius vector of the spacecraft and an arbitrary reference line in the orbital plane) is used as the independent variable.
PHALL 1 Institute of the Brasilia University (UNB) is developing a propellant that uses a plasma propulsion system based on Stationary Plasma Thrusters (SPT). They use permanent magnets that generates the magnetic field, reducing the electricity consumption. The characteristics of the propulsion system are: 2. specific impulse Is = 1607s; 3. specific energy = 0.06; 4. T = 2126 mN;
RESULTS Several maneuvers are used to test the method and to predict capabilities of the thrusters. Maneuver 1: Initial orbit: Semi-major axis: 99000 km, eccentricity: 0.7, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 105 deg. Initial data of the spacecraft: Total mass: 300 kg, Thrust magnitude: 1.0 N, Initial position: 0, True anomaly: -105 deg.
Maneuver 1 Condition imposed in the final orbit: Semi-major axis = 104000 km. Propulsion: 1 arc. Solution obtained: s0 = 80.3 deg, sf = 134.5 deg, 0 = -3.2, 0 = 0.0, = 0.443, = 0.0, = 0.041, = 0.00 Fuel consumed = 2.35 kg, Duration of burn = 6088.4 s. Final orbit obtained: Semi-major axis: 104000.71 km, eccentricity: 0.712, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 105 deg, True Anomaly = 30.1 deg.
Maneuver 1 Considering a linear approximation: s0 = 78.0 deg, sf = 132.5 deg, 0 = -8.8, 0 = 0.0, = 0.469, = 0.0 Fuel consumed = 2.39 kg (was 2.35 kg) , Duration of burn = 6111.6 s (was 6088.4 s). Final orbit obtained: Semi-major axis: 104000.73 km, eccentricity: 0.714, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 105 deg, True Anomaly = 28.2 deg.
Maneuver 2 Initial orbit: Semi-major axis: 99000 km, eccentricity: 0.7, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 105 deg. Initial data of the spacecraft: Total mass: 300 kg, Thrust magnitude: 1.0 N, Initial position: 0, True anomaly: -105 deg. Condition imposed in the final orbit: Semi-major axis = 104000 km. Propulsion: 1 arc, with restriction in applying thrust between the true anomalies of 120.0 deg and 180.0 deg (difference from 1).
Maneuver 2 Solution obtained: s0 = 23.1 deg, sf = 63.1 deg, 0 = -15.2, 0 = 0.0, = 0.098, = 0.0, = 0.034, = 0.00, Fuel consumed = 2.76 kg, Duration of burn = 7001.1 s. Final orbit obtained: Semi-major axis: 104000.03 km, eccentricity: 0.711, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 100.3 deg, True Anomaly = 318.2 deg.
Maneuver 2 Considering a linear approximation: s0 = 25.2 deg, sf = 65.0 deg, 0 = -26.3, 0 = 0.0, = 0.179, = 0.0 Fuel consumed = 2.80 kg (was 2.76 kg), Duration of burn = 7037.2 s (was 7001.1 s). Final orbit obtained: Semi-major axis: 104000.06 km, eccentricity: 0.713, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 102.1 deg, True Anomaly = 320.1 deg. Maneuver 2 considers the same situation with the extra constraint in the propulsion phase.
Maneuver 3 Initial orbit: Semi-major axis: 9900 km, eccentricity: 0.2, inclination: 10 deg, longitude of the ascending node: 0 deg, argument of periapsis: 25 deg. Initial data of the spacecraft: Total mass: 300 kg, Thrust magnitude: 2.0 N, Initial position: 0, True anomaly: -10 deg. Condition imposed in the final orbit: Semi-major axis = 10000 km. Propulsion: 1 arc. Smaller amplitude from previous ones.
Maneuver 3 Solution obtained: s0 = 0.0 deg, sf = 178.1 deg, 0 = 0.1, 0 = 0.0, = 0.032, = 0.0, = 0.022, = 0.00 Fuel consumed = 3.68 kg, Duration of burn = 4601.1 s. Final orbit obtained: Semi-major axis: 10000.00 km, eccentricity: 0.2, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 22.9 deg, True Anomaly = 163.2 deg.
Maneuver 3 Considering a linear approximation: s0 = 0.0 deg, sf = 179.3 deg, 0 = 2.1, 0 = 0.0, = 0.058, = 0.0 Fuel consumed = 3.73 kg (was 3.68 kg), Duration of burn = 4675.3 s (was 4601.1 s). Final orbit obtained: Semi-major axis: 10000.00 km, eccentricity: 0.2, inclination: 10 deg, longitude of the ascending node: 55 deg, argument of periapsis: 23.2 deg, True Anomaly = 165.9 deg. Note that the constraint s0 0.0 is active.
Maneuver 4 Initial orbit: Semi-major axis: 9900 km, eccentricity: 0.2, inclination: 10 deg, longitude of the ascending node: 0 deg, argument of periapsis: 25 deg. Initial data of the spacecraft: Total mass: 300 kg, Thrust magnitude: 2.0 N, Initial position: 0, True anomaly: -10 deg. Condition imposed in the final orbit: Semi-major axis = 10000 km. Propulsion: 2 arcs (the new fact, rest is similar to the previous one).
Maneuver 4 Solution obtained: First arc: s0 = 0.0 deg, sf = 89.7 deg, 0 = 1.0, 0 = 0.0, = 0.172, = 0.0; Second arc: s0 = 299.1 deg, sf = 417.6 deg, 0 = -8.1, 0 = 0.0, = 0.091, = 0.0 Fuel consumed = 3.21 kg, Duration of burn = 4009.9 s. Final orbit obtained: Semi-major axis: 10000.02 km, eccentricity: 0.207, inclination: 10 deg, longitude of the ascending node: 0.0 deg, argument of periapsis: 21.2 deg, True Anomaly = 45.1 deg. This maneuver shows that the use two arcs reduces the fuel consumption, from 3.73 kg to 3.21 kg in this case.
Maneuver 5 Initial orbit: Semi-major axis: 4500 km, eccentricity: 0.5, inclination: 8 deg, longitude of the ascending node: -145 deg, argument of periapsis: -20 deg. Initial data of the spacecraft: Total mass: 11300 kg, Thrust magnitude: 60000 N, Initial position: 0, True anomaly: 170 deg. Condition imposed in the final orbit: Semi-major axis = 10000 km, eccentricity = 0.122, Inclination = 2.29 deg (3 constraints!!). Propulsion: 1 arc and the burn must be completed before the true anomaly of 35.0 deg.
Maneuver 5 Solution obtained: s0 = 6.6 deg, sf = 27.8 deg, 0 = 0.8, 0 = 16.5, = -0.033, = -0.069 Fuel consumed = 5249.9 kg, Duration of burn = 377.4 s. Final orbit obtained: Semi-major axis: 7435.00 km, eccentricity: 0.122, inclination: 2.290 deg, longitude of the ascending node: 255.2 deg, argument of periapsis: 169.0 deg, True Anomaly = 324.6 deg. This maneuver considers the case where the thrust is large and that there are three keplerian elements to be changed.
CONCLUSIONS In this paper, analytical equations based in the patched conics approximation were used to calculate the variation in velocity, angular momentum, energy and inclination of a cloud of particles that performs a swing-by maneuver. The results show the distribution of those quantities for each particle of the cloud. Those results can be used to estimate the position of each individual particle in the future. From this information, it is possible to find a safe orbit for a spacecraft that will pass close to this cloud.
CONCLUSIONS Then, suboptimal control was explored to generate algorithms to obtain solutions for the minimum fuel maneuvers for a spacecraft, to allow an escape. Then we could test the physical parameters of a propulsion system that is under development in Brazil at UNB, called Phall 1. The results showed that the method applied here, as well as the propulsion system can be used to solve the proposed problem.