Download
1 / 64
670 likes | 731 Views
This lecture covers matrices in linear algebra, focusing on operations such as addition, scalar multiplication, and multiplication. It delves into the properties of matrices, the concept of transposes, symmetric and skew-symmetric matrices, and the inverse of a matrix using Gaussian-Jordan elimination. Additionally, cancellation properties of invertible matrices are discussed.

E N D
Lecture 2Matrices Lat Time - Course Overview - Introduction to Systems of Linear Equations - Matrices, Gaussian Elimination and Gauss-Jordan Elimination Reading Assignment: Chapter 1 of Text Homework #1_Chap1 Assigned (Due 10/05) Elementary Linear Algebra R. Larsen et al. (5 Edition) TKUEE翁慶昌-NTUEE SCC_09_2007
Lecture 2: Matrices Today • Gaussian Elimination and Gauss-Jordan Elimination • Operation with Matirces • Properties of Matrix Operations Reading Assignment: Secs 2.1-2.3 of Textbook Homework #1_Chap1 Assigned (Due 10/05) Next Time • Properties of Matrix Operations • Elementary Matrices • Applications: Economics and Mgmt. and Engrg. • Determinant of a Matrix Reading Assignment: Secs 2.4, 2.5&3.1 of Textbook Homework #1 Due and #2 Assigned
Lecture 2: Matrices Today • Operation with Matirces • Properties of Matrix Operations • Inverse of a Matrix
(i, j)-th entry: 2.1 Operations with Matrices • Matrix: row: m column: n size: m×n
j-th column vector • i-throw vector row matrix column matrix • Square matrix:m = n
Diagonal matrix: • Trace:
Equal matrix: • Ex 1: (Equal matrix)
Matrix addition: • Ex 2: (Matrix addition)
Matrix subtraction: • Ex 3: (Scalar multiplication and matrix subtraction) Find (a) 3A, (b) –B, (c) 3A–B • Scalar multiplication:
Sol: (a) (b) (c)
Size of AB where • Notes: (1) A+B = B+A, (2) • Matrix multiplication:
Ex 4: (Find AB) Sol:
= = = x A b • Matrix form of a system of linear equations:
Partitioned matrices: submatrix
= = = • a linear combination of the column vectors of matrix A: linear combination of column vectors of A
Keywords in Section 2.1: • row vector: 列向量 • column vector: 行向量 • diagonal matrix: 對角矩陣 • trace: 跡數 • equality of matrices: 相等矩陣 • matrix addition: 矩陣相加 • scalar multiplication: 純量積 • matrix multiplication: 矩陣相乘 • partitioned matrix: 分割矩陣
2.2 Properties of Matrix Operations • Three basic matrix operators: • (1) matrix addition • (2) scalar multiplication • (3) matrix multiplication • Zero matrix: • Identity matrix of order n:
Properties of matrix addition and scalar multiplication: Then (1) A+B = B + A (2) A + ( B + C ) = ( A + B ) + C (3) ( cd ) A = c ( dA ) (4) 1A = A (5) c( A+B ) = cA + cB (6) ( c+d ) A = cA + dA
Notes: • 0m×n: the additive identity for the set of all m×n matrices • –A: the additive inverse of A • Properties of zero matrices:
Properties of the identity matrix: • Properties of matrix multiplication: (1) A(BC) = (AB ) C (2) A(B+C) = AB + AC (3) (A+B)C = AC + BC (4) c (AB) = (cA) B = A (cB)
Sol: (a) (b) (c) • Ex: (Find the transpose of the following matrix) (a) (b) (c)
Ex: is symmetric, find a, b, c? Sol: Q: Will A stay symmetric by a row exchange? • Symmetric matrix: A square matrix A is symmetric if A = AT • Skew-symmetric matrix: A square matrix A is skew-symmetric if AT = –A
Note: is symmetric Pf: • Ex: is a skew-symmetric, find a, b, c? Sol:
Matrix: Three situations: • Real number: ab = ba (Commutative law for multiplication) (Sizes are not the same) (Sizes are the same, but matrices are not equal)
Note: • Ex 4: Sow that AB and BA are not equal for the matrices. and Sol:
Real number: (Cancellation law) • Matrix: (1) If C is invertible, then A = B (Cancellation is not valid)
Sol: So But • Ex 5:(An example in which cancellation is not valid) Show that AC=BC
Keywords in Section 2.2: • zero matrix: 零矩陣 • identity matrix: 單位矩陣 • transpose matrix: 轉置矩陣 • symmetric matrix: 對稱矩陣 • skew-symmetric matrix: 反對稱矩陣
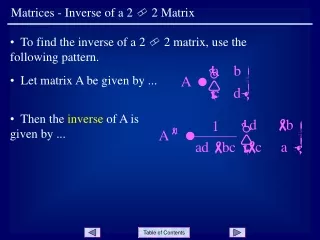
2.3 The Inverse of a Matrix • Note: A matrix that does not have an inverse is called noninvertible (or singular). • Inverse matrix: Consider Then (1) A is invertible (or nonsingular) (2) B is the inverse of A
Pf: • Notes: (1) The inverse of A is denoted by • Thm 2.7: (The inverse of a matrix is unique) If B and C are both inverses of the matrix A, then B = C. Consequently, the inverse of a matrix is unique.
Sol: • Find the inverse of a matrix by Gauss-Jordan Elimination: • Ex 2: (Find the inverse of the matrix)
Note: If A can’t be row reduced to I, then A is singular.
Sol: • Ex 3: (Find the inverse of the following matrix)
Check: So the matrix A is invertible, and its inverse is
Thm 2.8:(Properties of inverse matrices) If A is an invertible matrix, k is a positive integer, and c is a scalar, then
Pf: • Note: • Thm 2.9: (The inverse of a product) • If A and B are invertible matrices of size n, then AB is invertible and
Thm 2.10 (Cancellation properties) • If C is an invertible matrix, then the following properties hold: • (1) If AC=BC, then A=B (Right cancellation property) • (2) If CA=CB, then A=B (Left cancellation property) Pf: • Note: IfC is not invertible, then cancellation is not valid.
Pf: ( A is nonsingular) • Thm 2.11: (Systems of equations with unique solutions) If A is an invertible matrix, then the system of linear equations Ax = b has a unique solution given by (Left cancellation property) This solution is unique.
Keywords in Section 2.3: • inverse matrix: 反矩陣 • invertible: 可逆 • nonsingular: 非奇異 • singular: 奇異 • power: 冪次
Three row elementary matrices: Interchange two rows. Multiply a row by a nonzero constant. Add a multiple of a row to another row. 2.4 Elementary Matrices • Row elementary matrix: • An nn matrix is called an elementary matrix if it can be obtained • from the identity matrixI by a single elementary operation. • Note: • Only do a single elementary row operation.
Notes: • Thm 2.12: (Representing elementary row operations) Let E be the elementary matrix obtained by performing an • elementary row operation on Im. If that same elementary row • operation is performed on an mn matrixA, then the resulting • matrix is given by the product EA.
Ex 3: (Using elementary matrices) • Find a sequence of elementary matrices that can be used to write • the matrix A in row-echelon form. Sol:
![[MATRICES ]](https://cdn4.slideserve.com/144276/matrices-dt.jpg)